
Содержание
Система учета данных Федерации лыжных гонок России
Следующие соревнования
16-20 Сентября 2022
Чемпионат России, Всероссийские соревнования
Тюмень, Тюменская область
28 Сентября — 02 Октября 2022
Финал Кубка России
Заинск, Республика Татарстан (Татарстан)
29-30 Октября 2022
Всероссийские соревнования
Алдан, Республика Саха (Якутия)
17-20 Ноября 2022
Всероссийские соревнования
Кировск, Мурманская область
Соревнования сегодня
16.09.2022
Женщины
Мужчины
Последние результаты
Юниоры Лыжероллеры — Масстарт — Санкт-Петербург — ПР19-20
1
КОРОСТЕЛЕВ Савелий
Пермский край
42:46.9
2
ПОЛЯКОВ Олег
Брянская область
42:48.8
+1.9
3
ЛИПКИН Максим
Санкт-Петербург
43:17.4
+30.5
Юниорки Лыжероллеры — Масстарт — Санкт-Петербург — ПР19-20
1
НИКИТИНА Екатерина
Республика Мордовия
38:22. 4
4
2
БУШМЕЛЕВА Ксения
Ханты-Мансийский АО — Югра
38:32.4
+10.0
3
БОБКОВА Дарья
Москва
38:57.7
+35.3
Online-трансляция
Рейтинг ФЛГР 2022: Лучшие – 10
Мужчины, дистанция
1
БОЛЬШУНОВ Александр
Архангельская область
1880
2
ПОРОШКИН Илья
Республика Коми
1042
3
ЛАРЬКОВ Андрей
Республика Татарстан (Татарстан)
895
4
ЯКИМУШКИН Иван
Тюменская область
887
5
СЕМИКОВ Илья
Республика Коми
781
6
ЧЕРВОТКИН Алексей
Москва
776
7
СПИЦОВ Денис
Тюменская область
730
8
ВИЦЕНКО Алексей
Республика Коми
701
9
НИКОЛАЕВ Артем
Республика Татарстан (Татарстан)
594
10
ЗУБЦОВ Максим
Мурманская область
555
Мужчины, спринт
1
ТЕРЕНТЬЕВ Александр
Архангельская область — ННЦ
806
2
РЕТИВЫХ Глеб
Тюменская область
533
3
ПАРФЕНОВ Андрей
Тюменская область
512
4
БОЛЬШУНОВ Александр
Архангельская область
394
5
КУЗНЕЦОВ Андрей
Красноярский край — ПРМ
367
6
НАЗАРОВ Федор
Москва
362
7
КРАСНОВ Андрей
Санкт-Петербург
344
8
ВЕЧКАНОВ Владислав
Челябинская область
321
9
УСТЮГОВ Сергей
Ханты-Мансийский АО — Югра
304
10
ВИЦЕНКО Алексей
Республика Коми
286
Женщины, дистанция
1
НЕПРЯЕВА Наталья
Архангельская область
1359
2
ЖАМБАЛОВА Алиса
Тюменская область — БРТ
1183
3
СМИРНОВА Екатерина
Тюменская область
1142
4
ПРОКОФЬЕВА Анастасия
Москва — СПБ
670
5
СОРИНА Татьяна
Тюменская область
585
6
ИКСАНОВА Алия
Республика Татарстан (Татарстан)
534
7
ИСТОМИНА Мария
Пермский край
504
8
РОГОЗИНА Дарья
Ненецкий АО — ВРЖ
496
9
ЦАРЕВА Ольга
Республика Коми
489
10
ШАЛАБОДА Елизавета
Москва — Примк
480
Женщины, спринт
1
НЕПРЯЕВА Наталья
Архангельская область
617
2
СМИРНОВА Екатерина
Тюменская область
364
3
СОБОЛЕВА Диана
Санкт-Петербург
348
4
РУДОМЕТОВА Евгения
Тюменская область
345
5
ФАЛЕЕВА Анастасия
Санкт-Петербург — ННЦ
324
6
ДАВЫДЕНКОВА Мария
Республика Татарстан (Татарстан)
317
7
МАТВЕЕВА Наталья
Москва — РЯЗ
308
8
ДОЦЕНКО Анастасия
Республика Татарстан (Татарстан)
295
9
БАРАНОВА Алена
Томская область — РСХ
271
10
ЯКИМУШКИНА Ольга
Тюменская область
269
Сегодня день рождения
ЮРКОВ Сергей
Брянская область
мс
36
Исполнилось
КЛЕПИКОВА Анастасия
Ханты-Мансийский АО — Югра
мс
23
Исполнилось
ИЛЬИН Тимофей
Тульская область
1р
15
Исполнилось
ТИКУРКИНА Карина
Тюменская область
1р
15
Исполнилось
ГОРБАНЕВА Анна
Кемеровская область — Кузбасс
1р
15
Исполнилось
КАРАУЛЬНЫХ Елизавета
Тюменская область
1р
15
Исполнилось
| 207426 | — | AДМAКИНA Арина Республика Мордовия | Ж | 24. 02.2009 02.2009 | 13 | 1р | — | — | |
| 108203 | — | АБАЕВ Евгений Камчатский край | М | 17.03.2000 | 22 | 1р | — | — | |
| 203614 | — | АБАЕВА Гульсара Курганская область | Ж | 13.03.1993 | 29 | 1р | — | — | |
| 102316 | 3481156 | АБАЙДУЛИН Евгений Ямало-Ненецкий АО | М | 08.07.1991 | 31 | 1р | — | — | |
| 206965 | — | АБАЙДУЛИНА Арина Тюменская область | Ж | 25.04.2006 | 16 | 1р | — | — | |
| 104638 | 3482309 | АБАКУМОВ Владислав Санкт-Петербург | М | 22. 05.1996 05.1996 | 26 | 1р | — | — | |
| 101156 | 3480816 | АБАКУМОВ Николай Камчатский край | М | 28.07.1979 | 43 | мс | — | — | |
| 104279 | — | АБАНИН Дмитрий Хабаровский край | М | 22.07.1995 | 27 | 1р | — | — | |
| 108086 | — | АБАНИН Сергей Вологодская область | М | 15.04.1998 | 24 | 1р | — | — | |
| 202118 | 3486229 | АБАНОСИМОВА Алена Республика Коми | Ж | 31.10.1993 | 28 | кмс | — | — | |
| 201764 | 3486347 | АБАРОВСКАЯ Ольга Мурманская область | Ж | 23. 12.1973 12.1973 | 48 | 1р | — | КОЛАТОМ | |
| 203687 | 3486558 | АБАТУРОВА Мария Республика Саха (Якутия) | Ж | 24.04.1998 | 24 | 1р | — | — | |
| 102320 | 3481162 | АБАШЕВ Дмитрий Пермский край | М | 23.01.1991 | 31 | кмс | — | — | |
| 104878 | — | АБАШЕВ Тимур Удмуртская республика | М | 08.08.1987 | 35 | мс | — | — | |
| 205041 | — | АБАШЕВА Эвелина Вологодская область | Ж | 06.07.2002 | 20 | 1р | — | — | |
| 104470 | — | АБДРАХИМОВ Ильдар Челябинская область | М | 20. 09.1996 09.1996 | 25 | 1р | — | — | |
| 108761 | — | АБДРАШИТОВ Талгат Республика Татарстан (Татарстан) | М | 15.08.2001 | 21 | 1р | — | — | |
| 205036 | — | АБДРАШИТОВА Ляйсан Республика Татарстан (Татарстан) | Ж | 26.09.2002 | 19 | 1р | — | — | |
| 105436 | — | АБДУВАХАП Азизбек Республика Саха (Якутия) | М | 11.11.1994 | 27 | 1р | — | — | |
| 201476 | — | АБДУКАРОВА Наталья Ханты-Мансийский АО — Югра | Ж | 10.02.1993 | 29 | 1р | — | — | |
| 102248 | 3480998 | АБДУЛИН Руслан Оренбургская область | М | 17. 11.1989 11.1989 | 32 | кмс | — | — | |
| 110913 | — | АБДУЛЛИН Айдар Ульяновская область | М | 15.11.2005 | 16 | 1р | — | — | |
| 109454 | 3484212 | АБДУЛЛИН Дамир Республика Татарстан (Татарстан) | М | 12.03.2003 | 19 | кмс | — | — | |
| 103092 | 3481787 | АБДУЛЛИН Данил Челябинская область | М | 07.08.1993 | 29 | кмс | — | — | |
| 105458 | — | АБДУЛЛИН Рустем Республика Татарстан (Татарстан) | М | 24.12.1995 | 26 | 1р | — | — | |
| 103654 | 3482518 | АБДУЛМАНОВ Никита Свердловская область | М | 22. 08.1995 08.1995 | 27 | 1р | — | — | |
| 202513 | — | АБДУЛОВА Тамара Кемеровская область — Кузбасс | Ж | 07.02.1997 | 25 | 1р | — | — | |
| 111145 | — | АБДУЛХАЕВ Тимур Москва | М | 15.03.2006 | 16 | 1р | — | — | |
| 108468 | 3483793 | АБДУЛХАЛИКОВ Амир Красноярский край | М | 28.01.2001 | 21 | 1р | — | — | |
| 206869 | — | АБДУРАХИМОВА Полина Московская область | Ж | 12.05.2008 | 14 | 1р | — | — | |
| 107708 | — | АБДУРАХМАНОВ Данила Московская область | М | 09. 07.2001 07.2001 | 21 | 1р | — | — | |
| 102774 | 3482016 | АБДУРАХМАНОВ Евгений Московская область | М | 10.12.1986 | 35 | мс | — | — | |
| 200001 | 3485016 | АБДУХАЛИКОВА Марина Республика Саха (Якутия) | Ж | 24.10.1983 | 38 | мсмк | Д | — | |
| 106590 | — | АБДЫЛДАЕВ Роман Хабаровский край | М | 04.06.1998 | 24 | 1р | — | — | |
| 104446 | — | АБЕЛЯН Эдгар Московская область | М | 14.03.1996 | 26 | 1р | — | Истина | |
| 201972 | 3486301 | АБЛЯЕВА Анастасия Республика Татарстан (Татарстан) | Ж | 07. 08.1994 08.1994 | 28 | кмс | — | — | |
| 105792 | 3483140 | АБЛЯЗИЗОВ Руслан Пермский край | М | 29.06.1997 | 25 | мс | — | — | |
| 103129 | — | АБОЛЬЯНИН Михаил Пермский край | М | 01.01.1990 | 32 | кмс | — | — | |
| 204429 | 3487199 | АБОНОСИМОВА Дарья Республика Коми | Ж | 17.10.2002 | 19 | мс | — | — | |
| 204295 | 3486939 | АБРАЖЕЕВА Валерия Московская область | Ж | 18.01.2000 | 22 | 1р | — | ЛК «Наседкина» | |
| 112390 | — | АБРАМЕНКО Аркадий Владимирская область | М | 10. 11.2004 11.2004 | 17 | 1р | — | — | |
| 104135 | 3482507 | АБРАМОВ Александр Челябинская область | М | 08.06.1995 | 27 | кмс | — | — | |
| 101219 | 3481029 | АБРАМОВ Дмитрий Ханты-Мансийский АО — Югра | М | 20.06.1988 | 34 | кмс | Д | — | |
| 109039 | — | АБРАМОВ Егор Архангельская область | М | 23.03.2002 | 20 | 1р | — | — | |
| 111037 | — | АБРАМОВ Илья Кемеровская область — Кузбасс | М | 11.07.2006 | 16 | 1р | — | — | |
| 107674 | 3483451 | АБРАМОВ Никита Тюменская область | М | 19. 06.2000 06.2000 | 22 | кмс | — | — | |
| 107667 | — | АБРАМОВ Роман Чувашская республика — Чувашия | М | 03.11.2003 | 18 | 1р | — | — | |
| 108471 | 3484271 | АБРАМОВ Роман Красноярский край | М | 14.11.2001 | 20 | кмс | — | — | |
| 203712 | — | АБРАМОВА Алина Костромская область | Ж | 13.05.1999 | 23 | 1р | — | — | |
| 201962 | 3486302 | АБРАМОВА Виктория Республика Татарстан (Татарстан) | Ж | 26.12.1994 | 27 | кмс | — | — | |
| 202213 | 3486374 | АБРАМОВА Екатерина Самарская область | Ж | 17. 11.1995 11.1995 | 26 | 1р | — | — | |
| 203686 | 3487088 | АБРАМОВА Екатерина Мурманская область | Ж | 31.03.1996 | 26 | кмс | — | — | |
| 201889 | 3486067 | АБРАМОВА Екатерина Тюменская область | Ж | 24.02.1994 | 28 | кмс | — | — | |
| 200494 | 3485308 | АБРАМОВА Елена Липецкая область | Ж | 07.11.1975 | 46 | мс | — | — | |
| 202931 | 3486467 | АБРАМОВА Елена Ивановская область | Ж | 05.06.1998 | 24 | 1р | — | — | |
| 200779 | — | АБРАМОВА Ирина Тверская область | Ж | 01. 01.1989 01.1989 | 33 | 1р | — | — | |
| 206826 | — | АБРАМОВА Ксения Чувашская республика — Чувашия | Ж | 06.05.2005 | 17 | 1р | — | — | |
| 203049 | 3486595 | АБРАМОВА Ксения Санкт-Петербург — Республика Карелия | Ж | 10.10.1996 | 25 | мс | — | — | |
| 202478 | — | АБРАМОВА Мария Ивановская область | Ж | 23.10.1996 | 25 | 1р | — | — | |
| 200532 | — | АБРАМОВА Наталья Москва | Ж | 01.01.1975 | 47 | кмс | — | — | |
| 200575 | 3485377 | АБРАМОВА Ольга Москва | Ж | 15. 09.1988 09.1988 | 34 | мс | — | — | |
| 200906 | 3485484 | АБРАМОВА Светлана Чувашская республика — Чувашия | Ж | 30.01.1983 | 39 | кмс | — | — | |
| 202738 | — | АБРАМОВА Светлана Курганская область | Ж | 02.09.1997 | 25 | 1р | — | — | |
| 205761 | 3487616 | АБРАМОВСКАЯ Полина Архангельская область | Ж | 10.03.2003 | 19 | 1р | — | — | |
| 105349 | — | АБРОСИМОВ Станислав Удмуртская республика | М | 10.12.1993 | 28 | кмс | — | — | |
| 203528 | — | АБРОСИМОВА Анна Самарская область | Ж | 09. 03.1996 03.1996 | 26 | 1р | — | — | |
| 110844 | — | АБРОСОВ Артем Свердловская область | М | 11.04.2005 | 17 | 1р | — | — | |
| 206330 | — | АБСАТАРОВА Альбина Республика Саха (Якутия) | Ж | 24.06.2002 | 20 | 1р | — | — | |
| 101189 | 3480624 | АБУЛОВ Радик Тюменская область | М | 13.06.1987 | 35 | мс | — | — | |
| 203465 | — | АБУТАЛИПОВА Галия Республика Саха (Якутия) | Ж | 09.12.2000 | 21 | 1р | — | — | |
| 112397 | — | АВАНОВ Вячеслав Ленинградская область | М | 23. 02.2007 02.2007 | 15 | 1р | — | — | |
| 105331 | 3482594 | АВВАКУМОВ Юрий Вологодская область | М | 29.07.1996 | 26 | 1р | — | — | |
| 204610 | 3487108 | АВВАКУМОВА Дарья Вологодская область | Ж | 13.11.1999 | 22 | 1р | — | — | |
| 110056 | — | АВДЕЕВ Никита Рязанская область | М | 05.07.2002 | 20 | 1р | — | — | |
| 204199 | — | АВДЕЕВА Анастасия Сахалинская область | Ж | 23.10.2000 | 21 | 1р | — | — | |
| 202798 | — | АВДЕЕВА Мария Тверская область | Ж | 12. 06.1992 06.1992 | 30 | кмс | — | — | |
| 205222 | — | АВДЕЕВА Софья Кемеровская область — Кузбасс | Ж | 26.05.2008 | 14 | 1р | — | — | |
| 109298 | — | АВДЮШЕВ Данил Свердловская область | М | 22.04.2004 | 18 | 1р | — | — | |
| 102842 | — | АВЕРИН Александр Челябинская область | М | 01.01.1990 | 32 | 1р | — | — | |
| 100001 | 3480100 | АВЕРИН Андрей Московская область | М | 01.08.1972 | 50 | мс | — | — | |
| 109064 | — | АВЕРИН Дмитрий Самарская область | М | 10. 12.2002 12.2002 | 19 | 1р | — | — | |
| 108672 | — | АВЕРИН Николай Санкт-Петербург | М | 04.06.2002 | 20 | 1р | — | — | |
| 201444 | 3485755 | АВЕРИНА Анна Калужская область | Ж | 31.07.1995 | 27 | мс | — | — | |
| 204635 | — | АВЕРИНА Виктория Саратовская область | Ж | 20.09.2002 | 19 | 1р | — | — | |
| 107376 | — | АВЕРЧЕВ Дмитрий Тульская область | М | 15.03.1998 | 24 | 1р | — | — | |
| 107583 | — | АВЕРЬЯНОВ Егор Нижегородская область | М | 06. 04.2001 04.2001 | 21 | 1р | — | — | |
| 102988 | 3481578 | АВЕРЬЯНОВ Павел Санкт-Петербург | М | 09.06.1993 | 29 | 1р | — | — | |
| 103301 | — | АВЕРЬЯНОВ Сергей Москва | М | 01.01.1965 | 57 | 2р | — | — | |
| 202957 | — | АВЕТИСЯН Светлана Нижегородская область | Ж | 15.04.2000 | 22 | 1р | — | — | |
| 201667 | 3485996 | АВКСЕНТЬЕВА Любовь Архангельская область | Ж | 27.11.1994 | 27 | 1р | — | — | |
| 111654 | — | АВРАМОВ Дмитрий Санкт-Петербург | М | 28. 05.2005 05.2005 | 17 | 1р | — | — | |
| 105704 | 3483163 | АВРАМОВ Никита Московская область | М | 24.02.1998 | 24 | 1р | — | — | |
| 111024 | — | АВРАМОВ Руслан Московская область | М | 17.05.2003 | 19 | 1р | — | — | |
| 110874 | 3484542 | АВСЕЙКО Аркадий Республика Татарстан (Татарстан) | М | 15.01.2004 | 18 | 1р | — | — | |
| 109436 | 3484321 | АВСЕЙКО Арсений Республика Татарстан (Татарстан) | М | 12.06.2001 | 21 | 1р | — | — | |
| 108379 | — | АВСТРИЙСКИЙ Антон Санкт-Петербург | М | 13. 02.2002 02.2002 | 20 | 1р | — | — | |
| 106272 | — | АВХАДЕЕВ Руслан Свердловская область | М | 03.03.1998 | 24 | 1р | — | — | |
| 100698 | 3481100 | АГАВА Виталий Томская область | М | 29.11.1986 | 35 | кмс | — | ЦОП Н.Барановой | |
| 201179 | 3485627 | АГАВА Зинаида Томская область | Ж | 05.12.1990 | 31 | мс | — | Атомспорт ЦОП Н.Барановой | |
| 106193 | — | АГАЕВ Михаил Владимирская область | М | 29.11.1998 | 23 | 2р | — | — |
Результаты
Открытый летний Чемпионат и Первенство РТ среди лыжников-гонщиков (г. Заинск 02-04.09.2022)
Заинск 02-04.09.2022)
Летний Чемпионат и Первенство Республики Татарстан среди лыжников-гонщиков, г.Заинск ЦСП «Ялта-Зай» 01.10.2021-03.10.2021
Республиканские соревнования «Приз Главы Сармановского муниципального района» п.г.т. Джалиль
Открытый Чемпионат и Первенство г. Зеленодольска по лыжероллерам
Республиканские соревнования по лыжным гонкам на призы МСМК, чемпиона СССР Розалина Бакиева
Летний Чемпионат и Первенство РТ среди лыжников гонщиков
Протоколы летнего личного Первенства Республики Татарстан среди лыжников-гонщиков
«Республиканские соревнования по ОФП среди юношей и девушек 2003 г.р. и моложе, пгт. Джалиль»
Камский лыжный марафон — 2020
Республиканские соревнования по лыжным гонкам среди городов и сельских районов, посвященные памяти Фаниса Асгатовича Каримова
Летний чемпионат среди лыжников-гонщиков Республики Татарстан (25-27 сентября 2019 года)
Летнее личное Первенство среди лыжников-гонщиков 2002 – 2007 годов рождения и моложе
Республиканские соревнования по ОФП среди юношей и девушек 2002 г. р. и моложе. Кросс
р. и моложе. Кросс
Республиканские соревнования по ОФП среди юношей и девушек 2002 г.р. и моложе. Лыжероллеры
Чемпионат Республики Татарстан (3 тур) памяти ЗМС СССР В.А. Бекасова» 5-7.03.2019 г. ЦСП «Ялта-Зай» г. Заинск
2-ой тур Чемпионата республики Татарстан по лыжным гонкам
Первенство Приволжского федерального округа по лыжным гонкам среди юношей и девушек 17-18 лет
Чемпионат Приволжского Федерального округа по лыжным гонкам (г.Заинск)
Лично-командное Первенство Республики Татарстан по лыжным гонкам среди юношей и девушек 2003-2004 г.р. — 11-13 января 2019 года
Лично-командные открытые республиканские соревнования по лыжным гонкам среди юношей и девушек 2001-2002- 2003 г.р. и моложе на призы МСМК, чемпиона СССР Розалина Бакиева
1 тур Чемпионата Республики Татарстан «Гонка сильнейших лыжников» — 22-23 декабря 2018 года
29-30 сентября 2018 года. Летний чемпионат и первенство Республики Татарстан по общефизической подготовке среди лыжников-гонщиков
Летнее личное Первенство среди лыжников-гонщиков 2001 – 2005 годов рождения и моложе
Открытый чемпионат и Первенство г. Зеленодольска по лыжероллерам. 4.08.2018г.
Зеленодольска по лыжероллерам. 4.08.2018г.
Республиканские соревнования по ОФП среди юношей и девушек 2001 г.р. и моложе
Открытые республиканские соревнования по лыжным гонкам, посвященные памяти героя-поэта Мусы Джалиля на призы НГДУ «Джалильнефть»
40-ой открытый республиканский лыжный марафон на призы главы Бугульминского муниципального района
Первенство РТ по биатлону из пневматической винтовки «Снежный снайпер»
Открытое первенство Республики Татарстан по лыжным гонкам на призы заслуженного мастера спорта СССР И.С.Утробина
Чемпионат Республики Татарстан (III тур) памяти Заслуженного мастера спорта СССР В.А.Бекасова
Казанский юношеский лыжный марафон-2018
Чемпионат Республики Татарстан (III тур) памяти Заслуженного мастера спорта СССР В.А.Бекасова
ПЕРВЕНСТВО РЕСПУБЛИКИ ТАТАРСТАН НА ПРИЗЫ ЧЕМПИОНА РОССИИ И МСМК Е.А. БЕЛОВА ПО ЛЫЖНЫМ ГОНКАМ СРЕДИ ЮНОШЕЙ И ДЕВУШЕК 2004-2005 г.р., 2006 г.р. И МЛАДШЕ
Чемпионат Республики Татарстан по лыжным гонкам — СК «Маяк» — г. Зеленодольск, 9-11 февраля 2018 г.
Зеленодольск, 9-11 февраля 2018 г.
Первенство Приволжского федерального округа по лыжным гонкам (г.Заинск)
Итоги проведения Открытых Республиканских соревнований по лыжным гонкам на призы ООО «Казанские Стальные Профили»
Первенство Республики Татарстан среди юношей и девушек 2002 — 2003 г.р. и моложе
Первенство Республики Татарстан среди юношей и девушек 2000 — 2001 г.р. и моложе
Зеленодольская вечерняя лыжная гонка «Звездная» на призы главы Зеленодольского муниципального района
Спринт Сарманово
ЧЕМПИОНАТ РЕСПУБЛИКИ ТАТАРСТАН «ГОНКА СИЛЬНЕЙШИХ ЛЫЖНИКОВ-ГОНЩИКОВ»
Лично-командные открытые соревнования по лыжным гонкам среди юношей и девушек 2002-2003, 2004-2005 годов рождения на призы Мастера спорта международного класса, чемпиона СССР Розалина Бакиева
Летний чемпионат и первенство Республики Татарстан по общефизической подготовке. 29.09. — 1.10.2017 г. ЦСП «Ялта-Зай»
Первенство Республики по обще-физической подготовке среди юных лыжников-гонщиков (16-17 сентября 2017 года), Елабуга
Соревнования по ОФП на призы Сармановского МР 22-23 августа 2017
Соревнования на первенство г. Зеленодольск по лыжероллерам
Зеленодольск по лыжероллерам
Бугульминский марафон 2017
XXXXII Казанский юношеский лыжный марафон
Надежды Татарстана
Чемпионат РТ, г. Зеленодольск
Первенство РТ среди юношей и девушек 2001-2002 г.р. г. Зеленодольск
Лично-командное Первенство РТ среди юношей и девушек 1999-2000 г.р. в зачет XI Спартакиады учащихся
Открытые республиканские соревнования «Казанские стальные профили»
Чемпионат и Первенство Республики Татарстан «Гонка сильнейших лыжников-гонщиков»
Летний чемпионат и первенство РТ
Летнее Первенство Республики Татарстан по ОФП
Результаты
2022.01.05-07 Краевые соревнования по лыжным гонкам Скачать…
2022.01.05-09 Первенство Хабаровского края по лыжным гонкам Скачать…
2022.01.05-07 Чемпионат Хабаровского края по лыжным гонкам Скачать…
«Лыжные гонки в честь Ю.Чепаловой»» 12.03.2021 г. Второй день Скачать…
«Краевой фестиваль ветеранов по лыжным гонкам» 19-21. 02.2021 г. Скачать…
02.2021 г. Скачать…
«Лыжные гонки в честь Ю.Чепаловой»» 11.03.2021 г. Первый день Скачать…
Краевой этап «Пионерской правды» 25.02.2021 г. Второй день Скачать…
Краевой этап «Пионерской правды» 25.02.2021 г. Первый день. Скачать…
Чемпионат, первенство и краевые соревнования по лыжным гонкам 28.01.2021г. Скачать…
Чемпионат, первенство и краевые соревнования по лыжным гонкам 27.01.2021г. Скачать…
2020.08.25-27 Первенство по лыжероллерам и кроссу, раздельный старт. Скачать…
2020.08.25-27 Первенство по лыжероллерам и кроссу, финалы спринт. Скачать…
2020.08.25-27 Первенство по лыжероллерам и кроссу, квалификация спринт. Скачать…
25-27.09.2020 г. Первенство края по лыжероллерам и кроссу. Скачать… Скачать…
2020.03.2020.03.09 «Легкоатлетический пробег памяти сотрудников спецподразделения Альфа» Скачать…
2020.03.08 «Амурский праздник лыж» Скачать. ..
..
2020.03.01 «Волочаевская лыжная гонка» Скачать…
2020.02.21-23 «Краевой этап газеты Пионерская правда» Скачать…
2020.02.21-23 «Краевой фестиваль среди ветеранов» Скачать…
2020.02.11-14 Краевые соревнования среди спортивных школ Скачать…
2020.02.08 «Лыжня России» Скачать…
2020.02.08 «Лыжня России» Скачать…
2020.01.12-16 Спартакиада ВУЗов Скачать…
2020.01.09-12 Первенство края по лыжным гонкам среди 2004-2005 гр. Скачать…
2020.01.09-12 Первенство края по лыжным гонкам среди 2002-2003 гр. Скачать…
2020.01.09-12 Первенство по лыжным гонкам среди юниоров и юниорок Скачать…
2020.01.09-12 Краевые соревнования по лыжным гонкам Скачать…
2019.09. 2 день-кросс, чемпионат, первенство, краевые соревнования Скачать…
2019.09 1 день-лыжероллеры, чемпионат, первенство, краевые соревнования Скачать…
2019. 02.25-27 «II этап всероссийских соревнований по лыжным гонкам на призы газеты «Пионерская правда» Скачать…
02.25-27 «II этап всероссийских соревнований по лыжным гонкам на призы газеты «Пионерская правда» Скачать…
2019.01.07-11 Результаты первенства Хабаровского края Скачать…
2019.01.07-11 краевые соревнования (2005-2006гр) Скачать…
2019.01.07-09 Результаты чемпионата Хабаровского края. Скачать…
2018.09.30 2 день Первенство Хабаровского края-кросс. Скачать…
2018.09.29 1 день Первенство Х/к — лыжероллеры, спринт. Скачать…
2019.09.16 Протоколы «Юного динамовца» Скачать…
2018.09.23 Результаты г. Хабаровск лыжероллеры Скачать…
2018.03.25 Результаты закрытия сезона ДЮСШ «Лидер» Скачать…
2018.03.25 «Краевые соревнования по лыжным гонкам памяти ОЧ С.Савельева» Скачать…
2018 Результаты соревнования по лыжным гонкам на призы ОЧ Ю.Чепаловой Скачать…
2018 Результаты лыжной гонки памяти сотрудников ФСБ РФ. Скачать…
2018 «Краевые соревнования среди спортивных школ» Скачать. ..
..
2018.02.23 Лыжная гонка памяти Ветрова Н.В. Скачать…
2018.02.27 Результаты марафона «Волочаевские дни». Скачать…
2018.01.24 «Лыжня Приморья в Арсеньеве» Скачать…
2018.01.17-22 «Дальневосточные надежды в Арсеньеве» Скачать…
2017-2018 Утвержденная сборная Хабаровского края по лыжным гонкам Скачать…
2018.01.06-10 Судейская справка с «Первенства Хабаровского края по лыжным гонкам» Скачать…
2018.01.10-12 Чемпионат Хабаровского края по лыжным гонкам Скачать…
2018.01.10 «Первенство Хабаровского края по лыжным гонкам 3 день соревнований классический стиль». Скачать…
2018.01.03 «Рождественские старты в Переяславке» Скачать…
2018.01.07 «Первенство Хабаровского края по лыжным гонкам». 2 день-спринт,свободный стиль. Скачать…
2018.01.06-10 «Первенство Хабаровского края по лыжным гонкам». 1 день-индивидуальная гонка,свободный стиль. Скачать. ..
..
2017.12.10 Хабаровские городские соревнования «Все на лыжи» Скачать…
2017.12.24 Чемпионат и первенство Хабаровского края- 2 день свободный стиль Скачать…
2017.12.23-24 Чемпионат и первенство Хабаровского края- 1 классика Скачать…
2017.12.26 Ильинская вечерняя новогодняя лыжная гонка Скачать…
2017.03.12 Результаты краевых соревнований памяти С.П.Савельева Скачать…
2017.03.08 Результаты Амурского праздника лыж Скачать…
2017.03.05 Лыжная гонка «Альфа» Скачать…
2017.02.22 Лыжная гонка «Волочаевские дни» результаты Скачать…
2017.02. Результаты среди спортивных школ и фестиваль ветеранов-2017 Скачать…
Погода
Текущие протоколы
Протоколы.
Проект «На лыжи !»
Протоколы
РУСАЛ финансирует развитие трех крупных спортивных объектов в Братске.
Читать…
Новости, интервью
Loading the player…
Loading the player…
|
Первенство Иркутской области по ОФП среди лыжников-гонщиков
17-18 сентября 2022 г.
По техническим причинам в связи с условиями проживания соревнования переносятся на
23-25 сентября 2022 г.
Положение…
Внимание тренерский состав !
С 23 февраля по 5 марта в г.Кемерово будут проходить юношеские международные зимние игры «Дети Азии». В соревнованиях участвуют юноши и девушки 2006-2007 годов рождения. Иркутская область участвует в составе команды Сибирского федерального округа.
Сборная команда СФО будет сформирована по результатам отборочных соревнований, которые пройдут г.Новосибирске 22-23 декабря 2022 г. Состав команды 6 юношей и 6 девушек.
Для участия в отборе команда от Иркутской области будет сформирована по результатам декабрьского Первенства Иркутской области в количестве 10 человек (неважно сколько будет юношей или девушек в команде).
04 сентября 2022 г.
г.Ангарск
Открытое Первенство Ангарского городского округа по лыжероллерам Протокол…
06-07 августа 2022 г.
г.Ангарск
II Этап Кубка Иркутской области по летнему биатлону.
Протокол 1 день (кросс)…
Протокол 2 день (лыжероллеры)…
16 июня 2022 г.
г.Иркутск
I Этап Кубка Иркутской области по летнему биатлону.
Протокол…
Роспотребнадзор
Министерство спорта Иркутской области
Рекомендации при организации перевозки детей к местам соревнований и проведению учебно-тренировочных сборов
Рекомендации.
Памятка…
Внимание
Согласно распоряжению Министерства спорта Иркутской области «О требованиях при проведении спортивно-массовых мероприятий» от 22.04.2022 г. №02-96-907/22 вводятся новые правила написания «Положения» о проведении спортивно-массовых мероприятий.
Министерство спорта с настоящего времени будет утверждать только Положения, написанные согласно новому образцу !
Образец Положения…
Распоряжение…
ПОЛОЖЕНИЕ
Положение…
Календари
ОСО «Федерация лыжных гонок Иркутской области»
Календарь…
Областные любительские спортивно-массовые мероприятия Календарь…
ОСО «Федерация лыжных гонок России»
Календарь… | Внимание !
Антидопинг
Каждый спортсмен принимающий участие в межрегиональных и всероссийских официальных спортивных соревнованиях по лыжным гонкам Организация взаимодействия по вопросам противодействия допингу в спорте
Информация
Антидопинговая
Запрещенный список
Общероссийские антидопинговые правила
Министерство
«Рекомендации при организации перевозки детей к местам проведения соревнований и/или учебно-тренировочных сборов»
«О предоставлении отчетности»
О необходимости предоставления информации о следовании детских спортивных команд железнодорожным, воздушным транспортом в предверии и период зимних школьных каникул.
«Об усилении мер безопасности при организации массовых мероприятий»
«Об обеспечении общественного порядка при проведении официальных спортивных мероприятий»
«Об установлении норм расходов»
2. Распоряжение Правительства Иркутской области от 13.11.2019 № 911-рп «О внесении изменений в приложения 1, 2 …»
Приказ министерства №82-мпр от 03.10.2013г. и рекомендации о порядке утверждения Положений об официальных спортивных мероприятиях Иркутской области и требования к их содержанию.
Восточно-Сибирское
О предоставлении списка пассажиров организованной группы детей.
Правила провозки багажа.
Врачебно-физкультурный диспансер «ЗДОРОВЬЕ»
О необходимости соблюдения графика прохождения углубленных медицинских обследований…
Об утверждении порядка организации оказания медицинской помощи лицам занимающихся физической культурой и спортом…
|
 ..
..

 ..
..

 ..
..  ..
..Федерация лыжных гонок Приморского края
Опубликовано 17.07.2022 автором admin
Пока младшее поколение лыжников Приморского края тренеруются на родной Калиновской трассе, старшие ребята с 12 июля, в составе спортивной сборной команды России, проводят тренировочный сбор в Белорусском республиканском центре олимпийской подготовки по зимним видам спорта «Раубичи». Шалабода Елизавета — под руководством тренера Сорина Егора Владимировича, Новиков Лев — под руководством тренера Седова Петра Николаевича, Нелипа Данил, Кононова Александра, Горильченко Эдуард, Новикова Екатерина, Гаврилов Кирилл — под руководством тренера Новикова Константина Николаевича.
Шалабода Елизавета — под руководством тренера Сорина Егора Владимировича, Новиков Лев — под руководством тренера Седова Петра Николаевича, Нелипа Данил, Кононова Александра, Горильченко Эдуард, Новикова Екатерина, Гаврилов Кирилл — под руководством тренера Новикова Константина Николаевича.
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
14 июля, отмечает свой юбилейный, 75 летний день рождения вице президент ФЛГ Приморского края Лузянин Анатолий Иванович!! Желаем ему крепкого здоровья и долгих лет жизни, чтоб передавал свой многолетний тренерский опыт, молодым тренерам и подрастающим лыжникам Приморского края!
Опубликовано 15.07.2022 автором admin |
Оставить комментарий
Опубликовано 12.07.2022 автором admin
Лыжники всего приморья, Хабаровска и Хабаровского края проверили свои силы на Спасской земле, приняв участие в первенстве приморского края по кроссу среди лыжников гонщиков. 9 июля на лыжной трассе МБУ ЛСШ с. Калиновка собрались 300 сильнейших лыжников разных возрастов! Основную подготовку лыжник проходит летом и результаты соревнований показали, что работа ведётся в нужном направлении, наши ребята доказали свой высокий уровень! Так держать! Готовимся к зимнему сезону! 09.07.2022
Калиновка собрались 300 сильнейших лыжников разных возрастов! Основную подготовку лыжник проходит летом и результаты соревнований показали, что работа ведётся в нужном направлении, наши ребята доказали свой высокий уровень! Так держать! Готовимся к зимнему сезону! 09.07.2022
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 21.06.2022 автором admin
9 июля 2022г в спортивно-оздоровительном лагере «Родник здоровья» с.Калиновка, пройдет кросс среди лыжников гонщиков.
Положение 1 лист
Положение 2,3 лист
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 02.05.2022 автором admin
30 апреля 2022г
в 12:00 в ДК «Приморья» г. Спасск-Дальний прошло
собрание ФЛГ ПК. На собрании были рассмотрены вопросы по формированию календарного плана сезона 2022—2023, а также отчет по проведенному сезону 2021—2022 ст.тренера Новикова К. Н и тренера краевой школы Шурепа Ю.А.
Н и тренера краевой школы Шурепа Ю.А.
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
30 апреля 2022 г. в 12:00 в ДК «Приморья» г. Спасск-Дальний, ул. Красногвардейская 75/1 состоится собрание ФЛГ ПК,повестка собрания отчёт по итогам прошедшего сезона и обсуждение текущих вопросов!!!! Просьба всем обязательно присутствовать!!!!
Опубликовано 26.04.2022 автором admin |
Оставить комментарий
Опубликовано 31.03.2022 автором admin
26-27 марта в п.Восток. прошло закрытие зимнего сезона 2021—2022г, «Восток-Тур» 2022. В программе соревнований были дистанции на 30км свободным стилем и 27 марта гонка с выбыванием и гонка для боле старших спортсменов «Гандикап классическим стилем». Погода внесла в соревновательные дни свои коррективы, 26 марта шел дождь. а 27 марта порывистый ветер со снегом. Условия для гонок были сложные, ну в принципе как всегда весной. Так в целом, соревнования как всегда прошли отлично, спасибо генеральному спонсору соревнований в лице ген. директора ГРК и АИР В.И. Шепета за отлично приготовленную трассу и призы. Результат 26. 03.2022
директора ГРК и АИР В.И. Шепета за отлично приготовленную трассу и призы. Результат 26. 03.2022
Восток-Тур гандикап 2022
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 19.03.2022 автором admin
в г. Кирово-Чепецк (Кировской области) 11-15 марта прошли всероссийские соревнования по лыжным гонкам. Наш соотечественник, лыжник из Приморского края Новиков Лев, 11 марта занял призовое 2-е место в классическом спринте, а 15 марта в классическом масстарте на 30км, стал ПОБЕДИТЕЛЕМ!! Молодец!!
30км Классика Спринт
Его сестра, Новикова Екатерина, 15 марта выиграла всероссийскую гонку среди учащихся на призы «Пионерская правда». Поздравляем с этой победой и Екатерину!!!
Хотелось бы поздравить старшего тренера Приморского края по лыжным гонкам, Новикова Константина Николаевича, за подготовку наших спортсменов и высокие результаты на всероссийских и международных соревнованиях показанных с 2018г и по 2021г. , а также поблагодарить за его нелегкий труд.
, а также поблагодарить за его нелегкий труд.
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 10.03.2022 автором admin
Открытое первенство п.Восток проводится 25-27 марта 2022г. на спортивном комплексе «Восток». Непосредственное проведение соревнований возлагается на судейскую бригаду комплекса «Восток» Положение-Восток-Тур-2022
Восток тур 2022
Предварительные заявки на проживание и участие в соревнованиях принимаются до 24.03.2022г включительно: [email protected]
Справки по тел. 89084622902
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 28.02.2022 автором admin
Итоги прошедшего марафона Спасск 2022г
Марафон Спасск 2022
Фото Марафон Спасск 2022
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 27.02.2022 автором admin
6 марта в г. Лесозаводске на лыжной трассе «Маяк», пройдут соревнования по лыжным гонкам «Эстафета поколений»
Лесозаводске на лыжной трассе «Маяк», пройдут соревнования по лыжным гонкам «Эстафета поколений»
Положение 06 марта 2022
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 26.02.2022 автором admin
«Пионерская правда» по лыжным гонкам 05 – 07 марта 2022г ОТМЕНЯЕТСЯ, из-за отсутствия аккредитации Федерации лыжных гонок Приморского края!
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 21.02.2022 автором admin
Соревнования проводятся 05 – 07 марта 2022 на лыжных трассах «Лыжного комплекса» в с. Калиновка Спасского муниципального района, включенного во Всероссийский реестр объектов спорта, с использованием вспомогательных помещений муниципального бюджетного учреждения «Лыжная спортивная школа» городского округа Спасск – Дальний. _Положение 78 Пионерская правда край _Приложение №1 к положению 78
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Опубликовано 18. 02.2022 автором admin
02.2022 автором admin
Традиционный лыжный Марафон городского округа Спасск-Дальний проводится
на лыжных трассах в с. Калиновка Спасского муниципального района, 27 февраля 2022 года ПРИГЛАШАЕМ ВСЕХ ЖЕЛАЮЩИХ ПОУЧАСТВОВАТЬ.
_Положение Марафони ГОРОД
РАСПИСКА
Заявка Марафон 2022
Рубрика: Лыжная жизнь Приморья
|
Оставить комментарий
Helicobacter pylori FlgR – энхансер-независимый активатор холофермента σ54-РНК полимеразы
1. Alm, R. A., L.-S. Л. Линг, Д. Т. Мойр, Б. Л. Кинг, Э. Д. Браун, П. К. Дойг, Д. Р. Смит, Б. Нунон, Б. Д. Гилд, Б. Л. де Йонге, Г. Кармель, П. Дж. Туммино, А. Карузо, Дж. Уриа-Никельсен, Д. М. Миллс, К. Айвз, Р. Гибсон, Д. Мерберг, С. Д. Миллс, К. Цзян, Д. Э. Тейлор, Г. Р. Вовис и Т. Дж. Траст. 1999. Сравнение геномной последовательности двух неродственных изолятов желудочного патогена человека Хеликобактер пилори. Природа 397 : 176-180. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
2. Ашраф С.И., М.Т. Келли, Ю.-К. Ван и Т. Р. Гувер. 1997. Генетический анализ промотора Rhizobium meliloti nifH с использованием системы контрольного фага Р22. Дж. Бактериол. 179 : 2356-2362. [Бесплатная статья PMC] [PubMed] [Google Scholar]
3. Beier, D., and R. Frank. 2000. Молекулярная характеристика двухкомпонентных систем Хеликобактер пилори. J. Бактериол. 182 : 2068-2076. [Бесплатная статья PMC] [PubMed] [Google Scholar]
4. Бендер, Р. А., А. Д. Янссен, А. Д. Резник, М. Блюменберг, Ф. Фур и Б. Магасаник. 1977. Биохимические показатели глутаминсинтетазы из Klebsiella aerogenes. J. Бактериол. 129 : 1001-1009. [Бесплатная статья PMC] [PubMed] [Google Scholar]
5. Blaser, MJ 1998. Helicobacter pylori и желудочные заболевания. Биомед. Дж. 316 : 1507-1510. [Бесплатная статья PMC] [PubMed] [Google Scholar]
[Бесплатная статья PMC] [PubMed] [Google Scholar]
6. Bordes, P., S.R. Wigneshweraraj, J. Schumacher, X. Zhang, M. Chaney и M. Buck. 2003. АТФ-гидролизующий активатор транскрипции фаговый шоковый белок F из Escherichia coli : идентификация поверхности, которая связывает σ 54 . проц. Натл. акад. науч. США 100 : 2278-2283. [Бесплатная статья PMC] [PubMed] [Google Scholar]
7. Buck, M., S. Miller, M. Drummond, and R. Dixon. 1986. Последовательности активатора выше по течению присутствуют в промоторах генов фиксации азота. Nature (Лондон) 320 : 374-378. [Google Scholar]
8. Чейни М., Р. Гранде, С. Р. Вигнешверарадж, В. Кэннон, П. Казаз, М.-Т. Гальегос, Дж. Шумахер, С. Джонс, С. Элдеркин, А. Э. Даго, Э. Моретт и М. Бак. 2001. Связывание активаторов транскрипции с сигмой 54 в присутствии аналога переходного состояния АДФ-фторида алюминия: понимание механохимического действия активатора. Гены Дев. 15 : 2282-2294. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Гены Дев. 15 : 2282-2294. [Бесплатная статья PMC] [PubMed] [Google Scholar]
9. Coland, F., J.-C. Рейн, П. Гунон, А. Лабинь, П. Легрен и Х. Де Рёз. 2001. Идентификация фактора Helicobacter pylori анти-σ 28 . Мол. микробиол. 41 : 477-487. [PubMed] [Google Scholar]
10. Cover, TL, and MJ Blaser. 1992. Helicobacter pylori и гастродуоденальная болезнь. Анну. преподобный мед. 43 : 135-145. [PubMed] [Академия Google]
11. Dick, J.D. 1990. Helicobacter ( Campylobacter ) pylori : новый взгляд на старую болезнь. Анну. Преподобный Микробиолог. 108 : 70-90. [Google Scholar]
12. Итон К. А., Д. Р. Морган и С. Краковка. 1989. Campylobacter pylori факторы вирулентности у гнотобиотических поросят. Заразить. Иммун. 57 : 1119-1125. [Бесплатная статья PMC] [PubMed] [Google Scholar]
[Бесплатная статья PMC] [PubMed] [Google Scholar]
13. Итон, К. А., Д. Р. Морган и С. Краковка. 1992. Подвижность как фактор колонизации гнотобиотических поросят Helicobacter pylori. J. Med. микробиол. 37 : 123-127. [PubMed] [Google Scholar]
14. Гонсалес В., Л. Ольвера, X. Соберон и Э. Моретт. 1998. Исследования in vivo функции положительного контроля NifA: консервативный гидрофобный участок аминокислоты в центральном домене, участвующем в активации транскрипции. Мол. микробиол. 28 : 55-67. [PubMed] [Академия Google]
15. Хендрикссон, Д. Р., Б. Дж. Акерли и В. Дж. ДиРита. 2001. Мутагенез транспозона Campylobacter jejuni идентифицирует двустороннюю систему энергетического такси, необходимую для подвижности. Мол. микробиол. 40 : 214-224. [PubMed] [Google Scholar]
16. Heuermann, D., and R. Haas. 1998. Стабильная челночная векторная система для эффективной генетической комплементации штаммов Helicobacter pylori путем трансформации и конъюгации. Мол. Генерал Жене. 257 : 519-528. [PubMed] [Google Scholar]
Мол. Генерал Жене. 257 : 519-528. [PubMed] [Google Scholar]
17. Huala, E., and EM Ausubel. 1989. Центрального домена Rhizobium meliloti NifA достаточно для активации транскрипции с промотора R. meliloti nifH . Дж. Бактериол. 171 : 3354-3365. [Бесплатная статья PMC] [PubMed] [Google Scholar]
18. Huala, E., J. Stigter, and FM Ausubel. 1992. Центральный домен Rhizobium leguminosarum DCTD функционирует независимо, активируя транскрипцию. Дж. Бактериол. 174 : 1428-1431. [Бесплатная статья PMC] [PubMed] [Google Scholar]
19. Josenhans, C., E. Niehus, S. Amersbach, A. Horster, C. Betz, B. Drescher, K. T. Hughes и S. Suerbaum. 2002. Функциональная характеристика антагонистических жгутиковых поздних регуляторов FliA и FlgM Helicobacter pylori и их влияние на транскриптом H. pylori . Мол. микробиол. 43 : 307-322. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
20. Йованович Г., Дж. Раконяц и П. Модель. 1999. In vivo и in vitro активности Escherichia coli σ 54 активатор транскрипции, PspF, и его ДНК-связывающий мутант, PspFΔHTH. Дж. Мол. биол. 285 : 469-483. [PubMed] [Google Scholar]
21. Келли, М. Т., Дж. А. Фергюсон III и Т. Р. Гувер. 2000. Дефектные по инициации транскрипции формы σ 54 , отличающиеся способностью функционировать с гетеродуплексной ДНК-матрицей. Дж. Бактериол. 182 : 6503-6508. [Бесплатная статья PMC] [PubMed] [Google Scholar]
22. Ким, Дж. С., Дж. Х. Чанг, С. И. Чанг и Дж. С. Юм. 1999. Молекулярное клонирование и характеристика гена Helicobacter pylori fliP , важного фактора жгутиковой структуры и подвижности. Дж. Бактериол. 181 : 6969-6976. [Бесплатная статья PMC] [PubMed] [Google Scholar]
23. Koo, I.S., and R.S. Stephens. 2003. Регулируемая в процессе развития двухкомпонентная система передачи сигнала в Хламидии . Дж. Биол. хим. 278 : 17314-17319. [PubMed] [Google Scholar]
Koo, I.S., and R.S. Stephens. 2003. Регулируемая в процессе развития двухкомпонентная система передачи сигнала в Хламидии . Дж. Биол. хим. 278 : 17314-17319. [PubMed] [Google Scholar]
24. Кусту С., Э. Сантеро, Д. Пофэм, Д. Вайс и Дж. Кинер. 1989. Экспрессия σ 54 ( ntrA )-зависимых генов, вероятно, объединена общим механизмом. микробиол. Ред. 53 : 367-376. [Бесплатная статья PMC] [PubMed] [Google Scholar]
25. Ледебур Х. и Б. Т. Никсон. 1992. Тандемные сайты связывания DctD Rhizobium meliloti dctA вверх по течению активирующие последовательности необходимы для оптимального функционирования, несмотря на 50-100-кратную разницу в сродстве к DctD. Мол. микробиол. 6 : 3479-3492. [PubMed] [Google Scholar]
26. Ли, Дж. Х., Д. Шолль, Б. Т. Никсон и Т. Р. Гувер. 1994. Конститутивный гидролиз АТФ и активация транскрипции стабильной укороченной формой Rhizobium meliloti DCTD, σ 54 -зависимого активатора транскрипции. Дж. Биол. хим. 269 : 20401-20409. [PubMed] [Google Scholar]
Дж. Биол. хим. 269 : 20401-20409. [PubMed] [Google Scholar]
27. Ли, С.-К., А. Де Ла Торре, Д. Ян, С. Кусту, Т. Никсон и Д. Э. Веммер. 2003. Регуляция активатора транскрипции NtrC1: структурные исследования регуляторного и ААА+-АТФазного доменов. Гены Дев. 17 : 2552-2563. [Бесплатная статья PMC] [PubMed] [Google Scholar]
28. Lew, C.M., and JD Gralla. 2002. Новые роли консервативных областей в σ 54 -зависимом энхансер-связывающем белке. Дж. Биол. хим. 277 : 41517-41524. [PubMed] [Google Scholar]
29. Leying, H., S. Suerbaum, G. Geis, and R. Haas. 1992. Клонирование и генетическая характеристика гена флагеллина Helicobacter pylori . Мол. микробиол. 6 : 2863-2874. [PubMed] [Google Scholar]
30. Лукат, Г. С., В. Р. Макклири, А. М. Сток и Дж. Б. Сток. 1992. Фосфорилирование белков-регуляторов бактериального ответа низкомолекулярными фосфодонорами. проц. Натл. акад. науч. США 89 : 718-722. [Бесплатная статья PMC] [PubMed] [Google Scholar]
проц. Натл. акад. науч. США 89 : 718-722. [Бесплатная статья PMC] [PubMed] [Google Scholar]
31. Macnab, RM (ред.). 1996. Жгутики и подвижность, 2-е изд. ASM Press, Washington, D.C.
32. Magasanik, B. 1996. Регулирование использования азота, с. 1344-1356 гг. In F.C. Neidhardt, R. Curtiss III, JL Ingraham, ECC Lin, KB Low, B. Magasanik, W.S. Reznikoff, M. Riley, M. Schaechter и H.E. Umbarger (ed.), Escherichia coli и Salmonella : клеточная и молекулярная биология, 2-е изд., том. 1. ASM Press, Washington, D.C.
33. Martin, R.G., W.K. Gillette, N.I. Martin, and J.L. Rosner. 2002. Комплексообразование между активатором и РНК-полимеразой как основа для активации транскрипции MarA и SoxS у Escherichia coli. Мол. микробиол. 43 : 355-370. [PubMed] [Google Scholar]
34. Макги, Д. Дж., Ф. Дж. Рэдклифф, Р. Л. Мендз, Р. Л. Ферреро и Х. Л. Мобли. 1999. Helicobacter pylori rocF необходим для аргиназной активности и защиты от кислоты in vitro, но не обязателен для колонизации мышей или для уреазной активности. Дж. Бактериол. 181 : 7314-7322. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Ферреро и Х. Л. Мобли. 1999. Helicobacter pylori rocF необходим для аргиназной активности и защиты от кислоты in vitro, но не обязателен для колонизации мышей или для уреазной активности. Дж. Бактериол. 181 : 7314-7322. [Бесплатная статья PMC] [PubMed] [Google Scholar]
35. Миллер А., Д. Вуд, Р. Х. Эбрайт и Л. Б. Ротман-Денес. 1997. β’-субъединица РНК-полимеразы: цель независимой от связывания ДНК активации. Наука 275 : 1655-1657. [PubMed] [Академия Google]
36. Миллер, Дж. Х. 1972. Эксперименты по молекулярной генетике. Cold Spring Harbour Laboratory Press, Cold Spring Harbour, NY
37. Mobley, HLT и SL Hazell. 2001. Регуляция генов вирулентности, с. 400-450. В HLT Mobley (ed.), Helicobacter pylori : физиология и генетика. ASM Press, Вашингтон, округ Колумбия
38. Моретт, Э. и М. Бак. 1989. Исследования in vivo по взаимодействию РНК-полимеразы-σ 54 с промоторами Klebsiella pneumoniae и Rhizobium meliloti nifH : роль NIFA в формировании открытого промоторного комплекса. Дж. Мол. биол. 210 : 65-77. [PubMed] [Google Scholar]
Дж. Мол. биол. 210 : 65-77. [PubMed] [Google Scholar]
39. Neuwald, A.F., L. Aravind, JL Spouge, and E.V. Koonin. 1999. ААА+: класс шапероноподобных АТФаз, связанных со сборкой, работой и разборкой белковых комплексов. Геном Res. 9 : 27-43. [PubMed] [Академия Google]
40. Нинфа, А. Дж., Э. Г. Нинфа, А. Н. Лупас, А. М. Сток, Б. Магасаник и Дж. Сток. 1988. Взаимодействие между бактериальными белками, передающими сигнал хемотаксиса, и регуляторами транскрипции регулона Ntr: свидетельство того, что ассимиляция азота и хемотаксис контролируются общим механизмом фосфопереноса. проц. Натл. акад. науч. США 85 : 5492-5496. [Бесплатная статья PMC] [PubMed] [Google Scholar]
41. Норт, А. К., К. Э. Клозе, К. М. Стедман и С. Кусту. 1993. Белки, связывающие прокариотические энхансеры, отражают эукариотическую модульность: загадка регуляторного белка азота C. J. Bacteriol. 175 : 4267-4273. [Бесплатная статья PMC] [PubMed] [Google Scholar]
175 : 4267-4273. [Бесплатная статья PMC] [PubMed] [Google Scholar]
42. North, A.K., and S. Kustu. 1997. Мутантные формы энхансер-связывающего белка NtrC могут активировать транскрипцию из раствора. Дж. Мол. биол. 267 : 17-36. [PubMed] [Google Scholar]
43. Огура Т. и А. Дж. Уилкинсон. 2001. АТФазы суперсемейства ААА+: общая структура – разнообразные функции. Гены Клетки 6 : 575-597. [PubMed] [Google Scholar]
44. Ольчак А. А., Дж. В. Олсон и Р. Дж. Майер. 2002. Устойчивые к окислительному стрессу мутанты Helicobacter pylori. J. Бактериол. 184 : 3186-3193. [Бесплатная статья PMC] [PubMed] [Google Scholar]
45. Осуна Дж., X. Соберон и Э. Моретт. 1997. Предложенная архитектура центрального домена белков, связывающих бактериальный энхансер, на основе предсказания вторичной структуры и распознавания укладки. Белковая наука. 6 : 543-555. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Белковая наука. 6 : 543-555. [Бесплатная статья PMC] [PubMed] [Google Scholar]
46. O’Toole, P.W., M. Kostrzynska, and TJ Trust. 1994. Неподвижные мутанты Helicobacter pylori и Helicobacter mustelae с дефектом образования жгутиковых крючков. Мол. микробиол. 14 : 691-703. [PubMed] [Google Scholar]
47. Popham, D., D. Szeto, J. Keener, and S. Kustu. 1989. Функция бактериального белка-активатора, который связывается с усилителями транскрипции. Наука 243 : 629-635. [PubMed] [Google Scholar]
48. Porter, S.C., A.K. North, A.B. Wedel, and S. Kustu. 1993. Олигомеризация NTRC на энхансере glnA необходима для активации транскрипции. Гены Дев. 7 : 2258-2272. [PubMed] [Google Scholar]
49. Reitzer, LJ, and B. Magasanik. 1983. Выделение регулятора усвоения азота NR I , продукта гена glnG Escherichia coli. Проц. Натл. акад. науч. США 80 : 5554-5558. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Проц. Натл. акад. науч. США 80 : 5554-5558. [Бесплатная статья PMC] [PubMed] [Google Scholar]
50. Reitzer, LJ, and B. Magasanik. 1986. Транскрипция glnA из E. coli стимулируется активатором, связанным с сайтами, удаленными от промотора. Сотовый 45 : 785-792. [PubMed] [Google Scholar]
51. Rippe, K., M. Guthold, PH von Hippel, and C. Bustamante. 1997. Активация транскрипции с помощью образования петли ДНК: визуализация промежуточных соединений в пути активации E. coli РНК-полимераза σ 54 холофермент методом сканирующей силовой микроскопии. Дж. Мол. биол. 270 : 125-138. [PubMed] [Google Scholar]
52. Сссе-Дуайт С. и Дж. Д. Гралла. 1988. Исследование вышестоящего механизма активации Escherichia coli glnALG in vivo. проц. Натл. акад. науч. США 85 : 8934-8938. [Бесплатная статья PMC] [PubMed] [Google Scholar]
53. Seyler, R.W., Jr., J.W. Olson, and R.J. Maier. 2001. Дефицитные по супероксиддисмутазе мутанты Helicobacter pylori гиперчувствительны к окислительному стрессу и имеют дефекты в колонизации хозяина. Заразить. Иммун. 69 : 4034-4040. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Seyler, R.W., Jr., J.W. Olson, and R.J. Maier. 2001. Дефицитные по супероксиддисмутазе мутанты Helicobacter pylori гиперчувствительны к окислительному стрессу и имеют дефекты в колонизации хозяина. Заразить. Иммун. 69 : 4034-4040. [Бесплатная статья PMC] [PubMed] [Google Scholar]
54. Spohn, G., and V. Scarlato. 1999. Подвижность Helicobacter pylori координировано регулируется активатором транскрипции FlgR, гомологом NtrC. Дж. Бактериол. 181 : 593-599. [Бесплатная статья PMC] [PubMed] [Google Scholar]
55. Su, W., S. Porter, S. Kustu, and H. Echols. 1990. ДНК-петля и энхансерная активность: ассоциация между ДНК-связанным активатором NTRC и РНК-полимеразой на бактериальном промоторе glnA . проц. Натл. акад. науч. США 87 : 5504-5508. [Бесплатная статья PMC] [PubMed] [Google Scholar]
56. Suerbaum, S., C. Josenhans, and A. Labigne. 1993. Клонирование и генетическая характеристика генов флагеллина Helicobacter pylori и Helicobacter mustelae flaB и конструирование H. pylori flaA — и flaB -негативные мутанты путем аллельного обмена, опосредованного электропорацией. Дж. Бактериол. 175 : 3278-3288. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Labigne. 1993. Клонирование и генетическая характеристика генов флагеллина Helicobacter pylori и Helicobacter mustelae flaB и конструирование H. pylori flaA — и flaB -негативные мутанты путем аллельного обмена, опосредованного электропорацией. Дж. Бактериол. 175 : 3278-3288. [Бесплатная статья PMC] [PubMed] [Google Scholar]
57. Suerbaum, S., C. Josenhans, T. Sterzenbach, B. Drescher, P. Brandt, M. Bell, M. Droge, B. Fartmann, Х.-П. Фишер, З. Ге, А. Хорстер, Р. Холланд, К. Кляйн, Дж. Кониг, Л. Мако, Г. Л. Мендес, Г. Ньякатура, Д. Б. Шауэр, З. Шен, Дж. Вебер, М. Фрош и Дж. Г. Лиса. 2003. Полная последовательность генома канцерогенной бактерии Хеликобактер гепатикус. Проц. Натл. акад. науч. США 100 : 7901-7906. [Бесплатная статья PMC] [PubMed] [Google Scholar]
58. Tomb, J.-F., O. White, A.R. Keflavage, R.A. Clayton, GG Sutton, RD Fleischmann, K.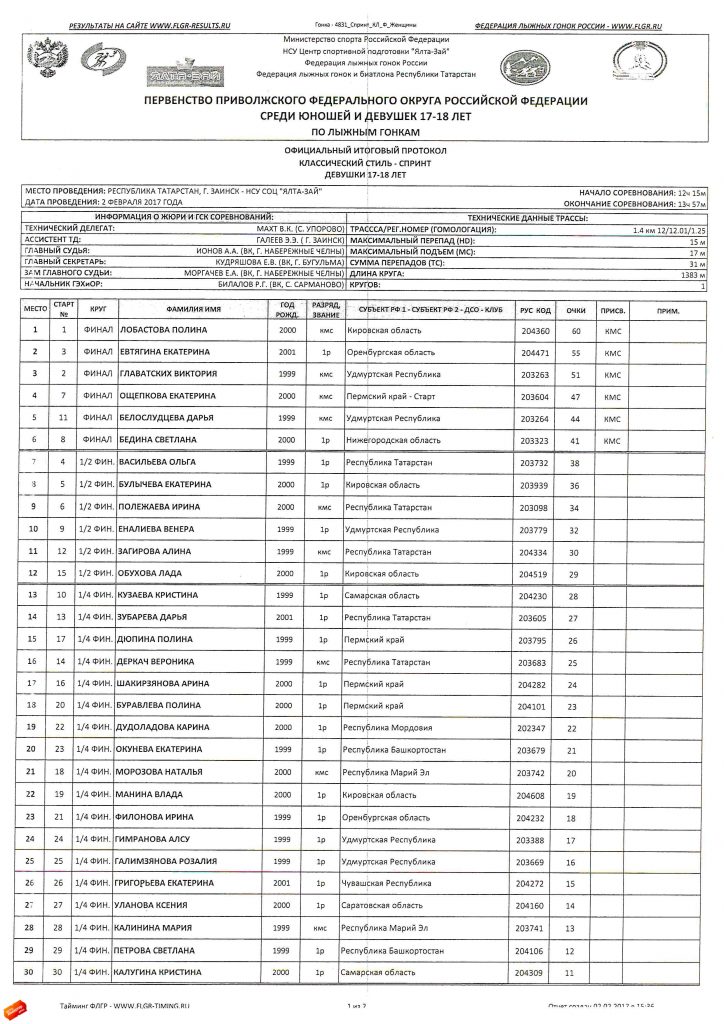 A. Ketchum, H.P. Klenk, S. Gill , Б. А. Догерти, К. Нельсон, Дж. Квакенбуш, Л. Чжоу, Э. Ф. Киркнесс, С. Петерсон, Б. Лофтус, Д. Ричардсон, Р. Додсон, Х. Г. Халак, А. Глодек, К. МакКенни, Л. М. Фитцеджеральд, Н. , Ли, М.Д. Адамс, Э.К. , Бородовский, П. Д. Карп, Х. О. Смит, К. М. Фрейзер и Дж. К. Вентер. 1997. Полная последовательность генома желудочного патогена Helicobacter pylori. Природа 388 : 539-547. [PubMed] [Google Scholar]
A. Ketchum, H.P. Klenk, S. Gill , Б. А. Догерти, К. Нельсон, Дж. Квакенбуш, Л. Чжоу, Э. Ф. Киркнесс, С. Петерсон, Б. Лофтус, Д. Ричардсон, Р. Додсон, Х. Г. Халак, А. Глодек, К. МакКенни, Л. М. Фитцеджеральд, Н. , Ли, М.Д. Адамс, Э.К. , Бородовский, П. Д. Карп, Х. О. Смит, К. М. Фрейзер и Дж. К. Вентер. 1997. Полная последовательность генома желудочного патогена Helicobacter pylori. Природа 388 : 539-547. [PubMed] [Google Scholar]
59. Ван Ю. и Д. Э. Тейлор. 1990. Устойчивость к хлорамфениколу у Campylobacter coli : нуклеотидная последовательность, экспрессия и клонирующий вектор. Гена 94 : 23-28. [PubMed] [Google Scholar]
60. Ван Ю.-К., Дж. Х. Ли, Дж. М. Брюэр и Т. Р. Гувер. 1997. Законсервированная область в σ 54 -зависимый активатор DctD участвует как в связывании с РНК-полимеразой, так и в связывании гидролиза АТФ с активацией. Мол. микробиол. 26 : 373-386. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
61. Weiss, D.S., J. Batut, K.E. Klose, J. Keener, and S. Kustu. 1991. Фосфорилированная форма энхансер-связывающего белка NTRC обладает АТФазной активностью, необходимой для активации транскрипции. Сотовый 67 : 155-167. [PubMed] [Google Scholar]
62. Ву, Дж. и А. Ньютон. 1997. Регулирование иерархии жгутиковых генов Caulobacter ; не только для подвижности. Мол. микробиол. 24 : 233-239. [PubMed] [Google Scholar]
63. Xu, H. 2003. Очистка и характеристика домена AAA+ Sinorhizobium meliloti DctD, сигма54-зависимого активатора. Кандидат наук. Тезис. Университет Джорджии, Афины.
64. Сюй Х. и Т. Р. Гувер. 2001. Дистанционная регуляция транскрипции у бактерий. Курс. мнение микробиол. 4 : 138-144. [PubMed] [Google Scholar]
65. Zhang X., M. Chaney, S.R. Wigneshweraraj, J. Schumacher, P. Bordes, W. Cannon и M. Buck. 2002. Механохимические АТФазы и активация транскрипции. Мол. микробиол. 45 : 895-903. [PubMed] [Google Scholar]
Schumacher, P. Bordes, W. Cannon и M. Buck. 2002. Механохимические АТФазы и активация транскрипции. Мол. микробиол. 45 : 895-903. [PubMed] [Google Scholar]
ETF FLGR | Холдинги, СЧА, Цена, Доходы, Чистые активы, Дневной объем
- Данные
- Аналитика
- Инструменты
- О
| Описание фонда | |
Franklin FTSE Germany ETF стремится обеспечить инвестиционные результаты, которые точно соответствуют, до вычета комиссий и расходов, показателям FTSE Germany Capped Index. FTSE Germany Capped Index — это взвешенный по рыночной капитализации индекс, отражающий динамику немецких акций с высокой и средней капитализацией.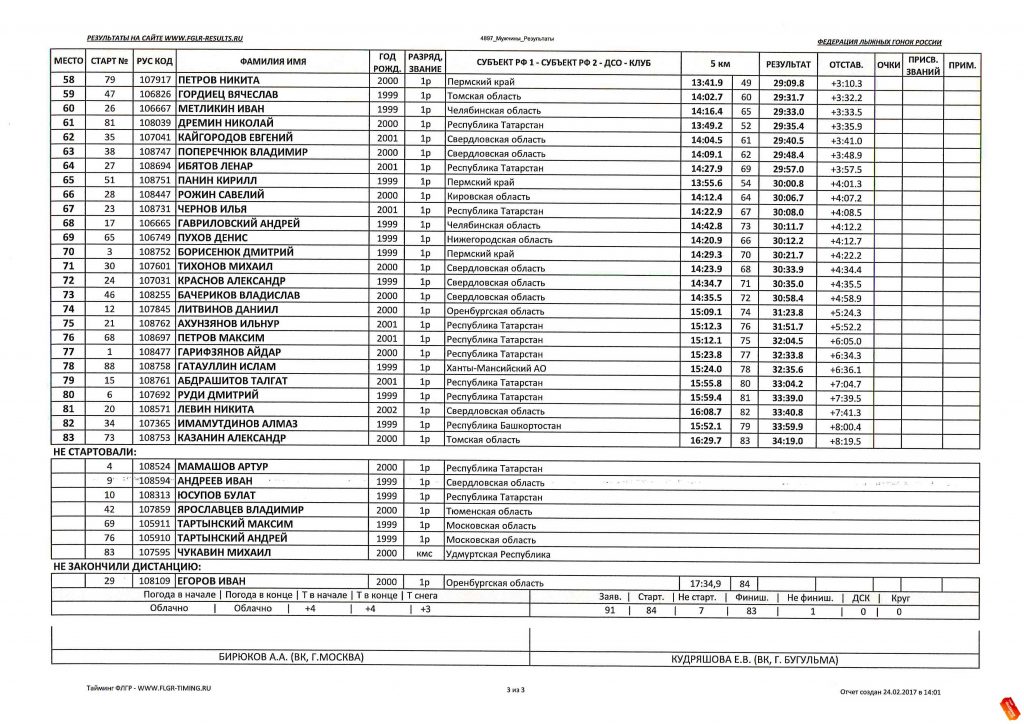 | |
| Профиль фонда | |
| Название фонда | Франклин FTSE Германия ETF |
| Тикер фондовой биржи | ФЛГР |
| Спонсор фонда | Франклин Темплтон |
| Фонд ISIN | US35473P7859 |
| Коэффициент чистых расходов | 0,09 % |
| Дата основания фонда | 2 ноября 2017 г. |
| Юридическая структура фонда | ETF (открытый фонд) |
| Обмен | NYSE Арка |
| Код страны листинга | США |
| Инвестиционная цель фонда | |
| Тип ETF | Глобальные акции или акции за пределами США — для конкретной страны |
| Класс активов | Акции (акции) |
| Связанный индекс | Пассивный |
| Имя индекса | Ограниченный индекс FTSE Германии |
| Поставщик индексов | FTSE Рассел |
| Хеджирование валюты | № |
| Обратный/с кредитным плечом | Не применимо |
| Разработано / Развивается | Фонды развитых рынков |
| Диапазон рыночной капитализации | Большая и средняя крышка |
| Значение роста | Сердцевина/смесь |
| Континент | Европа |
| Ключевые статистические данные | |
| Возврат на дату | 14 сентября 2022 г.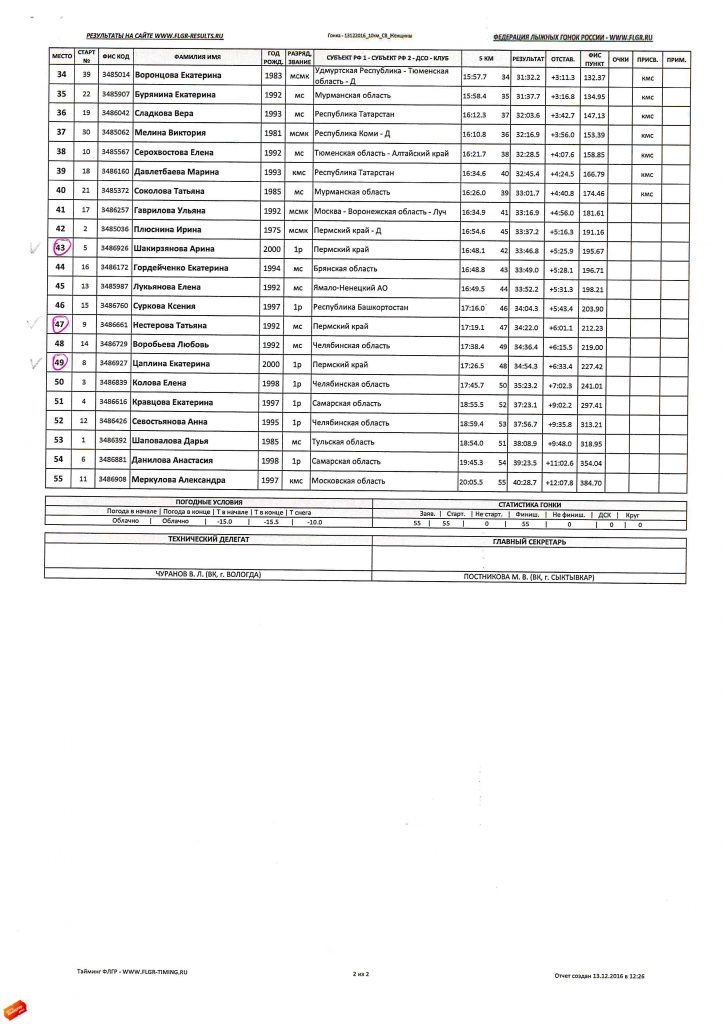 |
| Актив под управлением | 12,86 млн (долл. США) |
| Общий доход за 1 месяц | -8,58 % |
| Годовой отчет | -32,75 % |
| Общий доход за 1 год | -33,11 % |
| Общая годовая доходность за 3 года | -5,08 % |
| НАВ | 17,14 |
| Акции в обращении | 750 000 |
| 10 крупнейших холдингов (14 сентября 2022 г.) | |||
| Название учредителя | Учредительный код | Тип компонента | Взвешивание |
|---|---|---|---|
| SAP SE | САП | ЭКВИ | 0,0894000000 |
| СИМЕНС АГ-РЕГ | СИЭ | ЭКВИ | 0,0726000000 |
| ALLIANZ SE-REG | АЛВ | ЭКВИ | 0,0657000000 |
| ДОЙЧЕ ТЕЛЕКОМ АГ-РЕГ | ДТЭ | ЭКВИ | 0,0604000000 |
| БАЙЕР АГ-РЕГ | БАЙН | ЭКВИ | 0,0495000000 |
| ГРУППА МЕРСЕДЕС-БЕНЦ АГ | МБГ | ЭКВИ | 0,0455000000 |
| БАСФ СЭ | БАС | ЭКВИ | 0,0367000000 |
| МЮНХЕНЕР РЮКВЕР АГ-РЕГ | МУВ2 | ЭКВИ | 0,0342000000 |
| DEUTSCHE POST AG-REG | ДПВ | ЭКВИ | 0,0327000000 |
| ИНФИНЕОН ТЕХНОЛОДЖИС АГ | ИФХ | ЭКВИ | 0,0300000000 |
Вступительный тест – Колледж гуманитарных наук Обернского университета
- Мировые языки |
- Будущие студенты |
- Бакалавриат |
- Расширенное размещение |
- Вступительный тест
Чтобы обеспечить правильное зачисление на языковые курсы на уровне колледжа, Департамент мировых языков, литературы и культур требует, чтобы все поступающие студенты, которые предварительно знают испанский, французский или немецкий языки и планируют продолжить изучение языков в этих областях, должны пройти вступительный тест.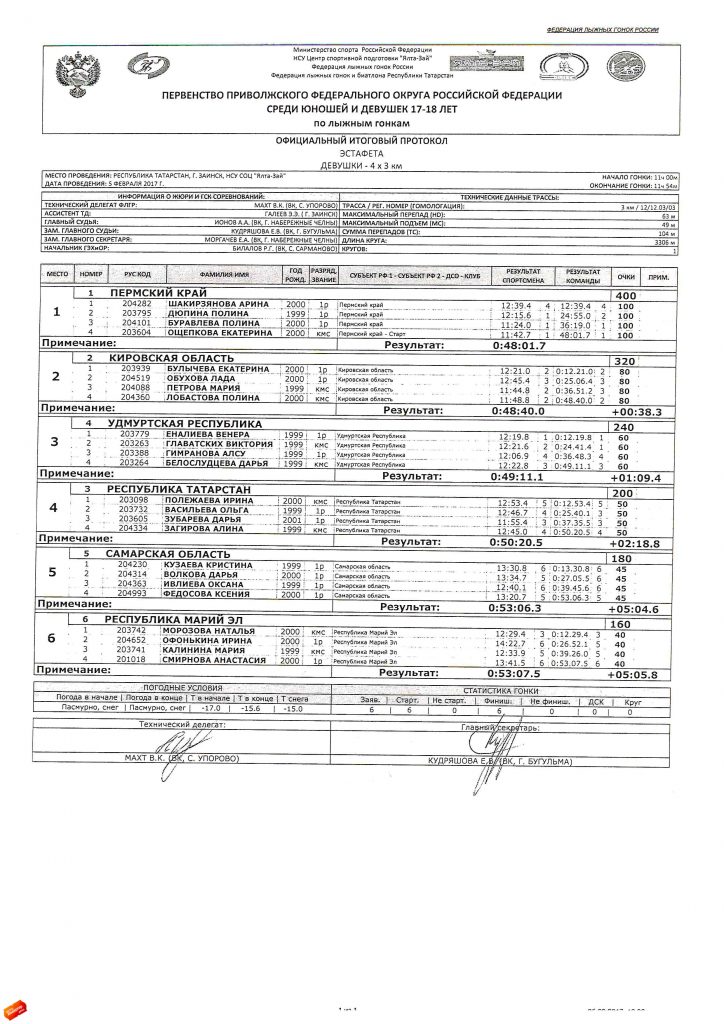 Для каждого языка разрешена только одна попытка.
Для каждого языка разрешена только одна попытка.
Вы будете сдавать компьютерный адаптивный вступительный экзамен, или CAPE, адаптивный экзамен с несколькими вариантами ответов, который включает вопросы по грамматике, чтению и словарному запасу. Никакие два студента не получают один и тот же тест, потому что вопросы рандомизированы. Тест определяет ваш уровень компетенции примерно за 20 минут.
Кто должен пройти тест?
Любой учащийся, который планирует продолжить изучение испанского, французского или немецкого языков на уровне колледжа. Вы не можете поступить в Колледж гуманитарных наук без требований по иностранному языку, но вы можете претендовать на получение кредита продвинутого уровня.
Почему мы тестируем?
Вступительный тест является хорошим индикатором ваших языковых способностей; правильное размещение делает ваше изучение языка более успешным.
Что проверяется?
Словарный запас и грамматические навыки на одном из распространенных языков: испанском, французском или немецком. Примечание. Хотя вступительные экзамены недоступны для китайского, итальянского, японского, латинского, греческого и русского языков, мы предлагаем курсы на этих языках, а также программы обучения за границей, стажировки и обмены, чтобы помочь вам улучшить свои языковые и культурные навыки.
Примечание. Хотя вступительные экзамены недоступны для китайского, итальянского, японского, латинского, греческого и русского языков, мы предлагаем курсы на этих языках, а также программы обучения за границей, стажировки и обмены, чтобы помочь вам улучшить свои языковые и культурные навыки.
Когда мне нужно пройти тест?
Студенты не могут сдавать вступительный тест, пока им не будет присвоен идентификационный номер студента Обернского университета. Поступающие первокурсники и переводные студенты должны сдать тест не менее чем за две недели до посещения ознакомительного курса (Camp War Eagle или Successfully Orienting Student). Текущие студенты Обернского университета также могут пройти вступительный тест, но настоятельно рекомендуется, чтобы они делали это как минимум за две недели до начала регистрации в каждом семестре, чтобы обеспечить надлежащее размещение и возможность зачисления.
Уровни размещения
Таблицы для сопоставления курса AU с соответствующими баллами вступительного теста ИСПАНСКИЙ | |
Уровень курса AU | Оценка вступительного теста |
ФЛСП 1010 | ниже 240 |
ФЛСП 1020 | 241-324 |
ФЛСП 2010 | 325-371 |
ФЛСП 2020 | 372-456 |
ФЛСП 3060 | выше 456 |
ФРАНЦУЗСКИЙ | |
Уровень курса AU | Оценка вступительного теста |
ФЛФР 1010 | ниже 260 |
ФЛФР 1020 | 261-336 |
ФЛФР 2010 | 337-402 |
ФЛФР 2020 | 403-456 |
ФЛФР 3010/3030/3040 | выше 456 |
НЕМЕЦКИЙ | |
Уровень курса AU | Оценка вступительного теста |
ФЛГР 1010 | ниже 240 |
ФЛГР 1020 | 241-324 |
ФЛГР 2010 | 325-371 |
ФЛГР 2020 | 372-456 |
ФЛГР 3010/3020/3030 | выше 456 |
Доступ к тесту и его завершение
Перед началом
- Выделите на тест не менее одного часа.
 Большинство студентов заканчивают обучение за меньшее время; однако, как только вы начнете, вы не сможете сделать паузу и вернуться позже.
Большинство студентов заканчивают обучение за меньшее время; однако, как только вы начнете, вы не сможете сделать паузу и вернуться позже. - Подготовьте свой идентификационный номер студента Обернского университета или идентификатор пользователя (текущего студента) и пароль.
Предупреждение:
- Пожалуйста, сдавайте тест на компьютере, а не на мобильном устройстве.
- Пожалуйста, наберитесь терпения — время от времени тест может быть медленным, особенно в самом конце, так что подождите некоторое время, не используйте кнопку «Назад» и не обновляйте экран.
- Если вы видите сообщение об ошибке, запишите его и отправьте по адресу [email protected].
Когда вы будете готовы начать
- Войдите в систему AU Access
- Перейти к Мои академические курсы
- Найдите Меню ученика
- Нажмите Вступительный тест по иностранному языку
Для просмотра результата теста
- Войдите в систему AU Access
- Перейти к Мои академики
- Нажмите Меню студента
- Щелкните Личные дела учащихся
- Нажмите Просмотр результатов теста
Если у вас возникли технические трудности, обратитесь в Департамент мировых языков, литературы и культуры по телефону 334-844-4345. Если вам требуются специальные условия для тестирования, договоритесь о прохождении теста через Управление доступности по телефону 334-844-209.6.
ФЛГР | Franklin FTSE Germany Обзор ETF
Поисковый тикер
|
ФЛГР
США: NYSE Arca
FLGRUS
Закрытый
Последнее обновление: 15 сентября 2022 г., 16:10. По восточному времени
Задержка котировки
-0,14
-0,82%
| Назад Закрыть |
|---|
| 17,16 $ |
Переключить параметры диаграммы
136% по сравнению со средним
Настроить MarketWatch
Есть списки наблюдения? Войдите, чтобы увидеть их здесь, или зарегистрируйтесь, чтобы начать.
Зарегистрироваться
… или Войти
Нет элементов в списке наблюдения
В настоящее время в этом списке наблюдения нет элементов.
Добавить бегущие строки
Угу
Что-то пошло не так при загрузке списка наблюдения.
Перейти к списку наблюдения
No Recent Tickers
Посетите страницу с котировками, и здесь будут отображаться недавно просмотренные тикеры.
- Открыть
$17,01 - Дневной диапазон
16.97 — 17.10 - 52-недельный диапазон
16.47 — 27.08 - Рыночная капитализация
Н/Д - Акции в обращении
750К - Всего чистых активов
11 100 миллионов долларов - Бета
Н/Д - НАВ
$17,14 - NAV Дата
14. 09.22 - Коэффициент чистых расходов
0,09% - Оборот %
7% - Выход
4,98% - Дивиденд
0,59 доллара США - Экс-дивидендная дата
17 июня 2022 г. - Средний объем
5,32 тыс.
Рейтинг Lipper с начала года: Квинтиль 5 (81-й процентиль)
- 1
Общий доход - 1
Стабильный возврат - 1
Сохранение - 4
Налоговая эффективность - 5
Расход
- Самый высокий
- 5
- 4
- 3
- 2
- 1
- Самый низкий
Нет доступных заголовков
Нет доступных заголовков
Нет доступных заголовков
Нет доступных заголовков
Нет доступных заголовков
Нет доступных заголовков
Нет доступных заголовков
| Категория | Европейский регион |
| Стиль портфолио | Европейский регион |
| Состояние фонда | Открыть |
| Создание фонда | 2 ноября 2017 г. |
| Менеджеры | Тинг Харрис |
Фонд стремится обеспечить инвестиционные результаты, которые точно соответствуют показателям FTSE Germany RIC Capped Index. Фонд инвестирует не менее 80% своих активов в ценные бумаги, составляющие базовый индекс, предназначенный для измерения эффективности немецких акций с высокой и средней капитализацией.
| Дата | Распределение доходов |
|---|---|
| с начала года | 0,59 $ |
| 2021 | 0,68 $ |
| 2020 | 0,65 $ |
| 2019 | 0,57 $ |
| 2018 | 0,60 $ |
| 2017 | — |
Закрыть полосу текущих тикеров
FLGR: Обучение представлению Gists фиксированной длины для гибридного нейроморфного непрерывного распознавания жестов на основе RNN-HMM промышленная среда.
Однако традиционное распознавание жестов с помощью камеры имеет два основных недостатка. Во-первых, скорость реакции обычной камеры ограничена ее частотой кадров, обычно 30 кадрами в секунду, что приводит к размытию изображения при съемке быстрых движений рук. Во-вторых, получение изображений на основе накопленных кадров может привести к избыточности данных и потребности в памяти, тем самым препятствуя крупномасштабному коммерческому использованию встроенных систем. По сравнению с обычными камерами нейроморфные датчики зрения в качестве биосенсора не захватывают полные изображения с фиксированной частотой кадров. Кроме того, они характеризуются высоким временным разрешением (микросекунды), большим динамическим диапазоном (120–140 дБ), малой мощностью и малой полосой пропускания. Нейроморфное зрение представляет собой сдвиг парадигмы в компьютерном зрении из-за его принципа работы и нетрадиционного вывода.
Тем не менее, текущее исследование нейроморфного распознавания жестов полностью относится к сегментированному распознаванию жестов. Для сегментированного распознавания жестов сценарий проблемы можно просто описать как классификацию четко очерченной последовательности видеокадров как одного из набора типов жестов. Это контрастирует с непрерывным/онлайн-распознаванием человеческих жестов, где нет априорно заданных границ выполнения жестов (Aggarwal and Ryoo, 2011; Wang et al., 2018). Имеет смысл разработать новую архитектуру для нейроморфного распознавания непрерывных жестов, что является первым шагом к онлайн-распознаванию.
Однако, учитывая характер событий переменной длины и асинхронной последовательности, он не подходит для прямой подачи событий в общий классификатор для задач классификации последовательности, например, распознавания жестов. Существующие работы накапливают выходные события нейроморфного датчика в течение продолжительности (например, 30 мс) и обозначают их как кадр изображения (Moeys et al., 2016). Эти методы выполняют задачу классификации и распознавания на уровне изображения, тем самым отказываясь от природы событий. Следовательно, срочно необходимы новые представления и технологии для использования возможностей нейроморфного зрения. Цель этого исследования была двоякой: исследовать новое представление нейроморфных событий и исследовать способность переводить успехи в области глубокого обучения в нейроморфное зрение при распознавании жестов.
1.1. Датчик нейроморфного зрения
Датчик динамического зрения (DVS), разновидность нейроморфного датчика зрения (Lichtsteiner et al., 2008), использовался для получения данных о жестах рук. Дизайн нейроморфных датчиков зрения вдохновлен тем, как зрение происходит на сетчатке биологического глаза, например, человеческого глаза, что отражается в его одноименных атрибутах, включая асинхронный и временной контраст. Первый указывает на то, что каждый из пикселей DVS приводит к изменению интенсивности после его запуска, в отличие от синхронного способа, при котором обычная камера опрашивает все пиксели сразу каждые несколько миллисекунд. Последнее подразумевало, что пиксель срабатывает, когда изменение интенсивности света в его положении превышает определенный порог. Эти атрибуты делают пиксели DVS сопоставимыми с ганглиозными клетками сетчатки.
Используемый здесь DVS имеет пространственное разрешение 128 × 128 пикселей, а также временное разрешение в микросекундах, что позволяет предположить, что временные метки событий фиксируются автономным счетчиком с частотой 11 кГц. Каждая схема пикселя отслеживает временной контраст, определяемый как логарифмическая интенсивность света. Событие запускается каждый раз, когда временной контраст превышает пороговое значение θ. Весь процесс имеет задержку 15 мкс. DVS передает события через USB в виде адресно-событийного представления (AER). В AER каждое событие представляет собой 4-кортеж ( t, x, y, p ), где t обозначает метку времени; x и y — координаты источника события; p — полярность события.
1.2. Представление для нейроморфного зрения
Поскольку поток нейроморфных событий асинхронен и имеет переменную длину, исследователи попытались представить их как еще один тип данных, которые легко обрабатывать для последующих задач обнаружения и распознавания. Существующие методы представления событий DVS делятся на 4 типа, а именно представление на основе полностью накопленных кадров, представление на основе полунакопленных кадров, представление на основе реконструированных кадров и представление на основе ненакопленных кадров. . Во-первых, наиболее широко используемым представлением нейроморфных событий является полностью накопленное представление на основе фреймов. Парк и др. (2016) и Maqueda et al. (2018) события накапливались в кадре длительностью в среднем 30 мс. Видаль и др. (2018) свернули каждое пространственно-временное окно событий в синтетический накопленный кадр, нарисовав каждое событие на кадрах изображения. Они использовали угловой детектор FAST, чтобы выделить особенности на кадрах. Во-вторых, события обрабатывались полунакопленным представлением на основе кадра перед их накоплением в кадре (Lee et al., 2014; Mueggler et al., 2015). Мюгглер и др. (2015) обработали события с помощью оценки продолжительности жизни и аккумулировали их, чтобы получить изображение градиента формы. Ли и др. (2014) обрабатывали события с помощью нейронов с дырявой интеграцией и стрельбой (LIF) и кластеризовали движущуюся руку, накапливая выходные события из LIF с интервалом 3 мс. В-третьих, Бардоу и др. (2016) и Munda et al. (2018) использовали изменение интенсивности для восстановления серого изображения. Однако отмечено, что все три метода, описанные выше, обрабатывают события на уровне накопленного кадра изображения. Поскольку преобразованные изображения часто бывают размытыми и избыточными, предварительная обработка на уровне изображений отрицательно влияет на производительность модели и отказывается от парадигмы управления событиями, удобной для аппаратного обеспечения. В результате такие методы отказываются от характера данных о событиях и приводят к ненужной избыточности данных и потребности в памяти. В последние годы обработка последовательности событий больше не осуществляется на уровне изображения, а больше ориентирована на естественную обработку последовательности событий (Neil et al. , 2016; Wu et al., 2018). Ву и др. (2018) впервые обучили LSTM, управляемую событиями, и доказали способность рекуррентной нейронной сети (RNN) обрабатывать задачу классификации на основе событий. Обратите внимание, что они применили свою структуру к набору данных N-MNIST, который представляет собой набор данных платных рукописных цифр. В обзорном документе (Cadena et al., 2016) подчеркивается, что основным узким местом событийного компьютерного зрения является правильное представление последовательности событий. Поскольку выходные данные состоят из последовательности асинхронных событий, традиционные алгоритмы компьютерного зрения на основе кадров неприменимы. Это требует смены парадигмы традиционных подходов к компьютерному зрению, разработанных за последние 5 десятилетий. Они объяснили, что целью разработки таких алгоритмов является сохранение событийной природы датчика. Таким образом, необходимо дополнительно доказать возможности представления на основе ненакопленных изображений, применяя их к задачам, управляемым событиями.
1.3. Связанные работы
В рамках недавнего развития глубокого обучения (Крижевский и др., 2012) многие методы, используемые для распознавания жестов рук с помощью обычных камер, были представлены на основе сверточных нейронных сетей (ConvNets) (Ji et al., 2013; Neverova et al., 2014; Молчанов и др., 2015; Knoller et al., 2016; Sinha et al., 2016) и RNN (Ohn-Bar and Trivedi, 2014; Neverova et al., 2016; Wu et al., 2016). Среди этих структур RNN привлекательны тем, что они снабжают нейронные сети памятью для временных задач, а также введением блоков стробирования, например, LSTM и GRU (Hochreiter and Schmidhuber, 19).97; Cho et al., 2014) внесли значительный вклад в то, чтобы сделать изучение этих сетей управляемым. В целом методы, основанные на глубоком обучении, превосходят традиционные методы, основанные на ручных функциях, в задачах распознавания жестов (Wang et al., 2018).
Все вышеперечисленные усилия основаны на обычных камерах с фиксированной частотой кадров. Обычные камеры будут страдать от различных артефактов, связанных с движением (размытость движения, скользящий затвор и т. д.), которые могут повлиять на производительность быстрого распознавания жестов. Напротив, данные о событиях, генерируемые датчиками нейроморфного зрения, являются естественными детекторов движения и автоматически отфильтровывать любую временно избыточную информацию. DVS — многообещающий датчик для задач с малой задержкой и низкой пропускной способностью. В Delbruck and Lang (2013) был представлен робот-вратарь со временем реакции 3 мс. Локализация робота была продемонстрирована Mueggler et al. (2014) с использованием ДВС при скоростных маневрах, при которых измерялась скорость вращения до 1200°/с при переворотах квадрокоптера. Между тем, распознавание жестов жизненно важно для взаимодействия человека и робота. Следовательно, нейроморфная система распознавания жестов крайне необходима.
Ан и др. (2011) были одной из первых групп, которые использовали DVS для распознавания жестов при обнаружении и различении трех бросков классической игры «камень-ножницы-бумага». Примечательно, что их работа была опубликована в 2011 году, что предшествовало эпохе глубокого обучения. Изобретатели DVS осуществили распознавание жестов с помощью импульсных нейронных сетей и нейронов с дырявой интеграцией и запуском (LIF) (Gerstner and Kistler, 2002; Lee et al., 2012a,b, 2014). Спайковые нейронные сети (SNN) представляют собой обучаемые модели мозга, поэтому они подходят для нейроморфных датчиков. В 2016 году глубокое обучение было впервые применено для распознавания жестов с помощью DVS (Park et al., 2016). С помощью технологии сверхвысокого разрешения путем пространственно-временной демозаики в потоке событий они обучили CNN GoogLeNet с реконструированной информацией для классификации этих кадров временного слияния и декодирования вывода сети с помощью LSTM. Амир и др. (2017) обрабатывали поток событий DVS в реальном времени с помощью IBM TrueNorth, процессора, изначально основанного на событиях, содержащего 1 миллион импульсных нейронов. Чип TrueNorth, сконфигурированный как сверточная нейронная сеть (CNN), идентифицирует начало жеста с задержкой 105 мс при потреблении <200 мВт.
На самом деле непрерывное распознавание жестов — это задача, полностью отличающаяся от сегментированного распознавания жестов. Для сегментированного распознавания жестов (Lee et al., 2012a; Amir et al., 2017) сценарий проблемы можно резюмировать как классификацию четко очерченной последовательности видеокадров как одного из набора типов жестов. Это контрастирует с непрерывным/онлайн-распознаванием человеческих жестов, где нет априорно заданных границ выполнения жестов. В простом случае, когда видео сегментировано, чтобы содержать только одно выполнение человеческого жеста, система стремится правильно классифицировать видео по своей категории жестов. В более общих и сложных случаях необходимо выполнять непрерывное распознавание человеческих жестов, чтобы определить время начала и окончания всех происходящих жестов из входного видео (Aggarwal and Ryoo, 2011). Однако до сих пор не проводилось измерений эффективности обнаружения в задаче распознавания нейроморфных жестов. Короче говоря, непрерывное распознавание жестов — это первый шаг к онлайн-распознаванию, хотя это сложнее, чем сегментированное распознавание жестов (Wang et al. , 2018).
Однако представление событийно-ориентированного распознавания на основе ненакопленных изображений не привлекло должного внимания. Оба метода, Park et al. (2016) и Амир и соавт. (2017), относятся к представлению на основе полунакопленных кадров и обучают CNN на кадрах. Более того, CNN в Amir et al. (2017) был основан на нейроморфном оборудовании, которое не полностью доступно для научных и академических областей. Не было чистой глубокой сети, которая могла бы обрабатывать последовательность представлений на основе ненакопленных кадров для задачи распознавания жестов. Глубокая сеть должна быть срочно разработана для обработки событий или последовательности представлений на основе ненакопленных кадров, чтобы исследовать сдвиг парадигмы в сообществе нейроморфного зрения (Cadena et al., 2016). Из-за асинхронной природы данных прямое необработанное распознавание на основе событий может быть неудовлетворительным. Таким образом, изучение нового представления на основе ненакопленных кадров для распознавания, управляемого событиями, становится многообещающим направлением для уменьшения отмеченного негативного эффекта и максимального увеличения возможностей данных последовательности, основанной на событиях.
Остальная часть этого исследования организована следующим образом: в разделе 2 описывается предварительная обработка, обучение представлению и гибридная временная классификация RNN-HMM для нейроморфного непрерывного распознавания жестов. В разделе 3 была проверена коллекция набора данных Neuro ConGD, показатели оценки и результаты экспериментов. В разделе 4 подводятся итоги этого исследования.
2. Методы
В этом разделе должна быть описана структура нейроморфного распознавания непрерывных жестов. Основная идея этого исследования показана на рис. 1.9.0009
Рисунок 1 . Обзор фреймворка для нейроморфного непрерывного распознавания жестов. Сеть автоэнкодера была разделена на кодировщик и декодер, обмениваясь информацией только по одному ребру в вычислительном графе. Автоэнкодер был обучен без присмотра. Часть кодера преобразует последовательности событий переменной длины фиксированной продолжительности в векторы фиксированной длины. Модуль обучения представлению изучает новое представление FLGR (представление Gists фиксированной длины). Затем последовательности FLGR передаются в гибридную систему с RNN и HMM для выполнения временной классификации.
Структура состоит из двух основных частей, а именно обучения представлению и временной классификации. В разделе 2.1 впервые рассказывается о том, как события, инициированные из DVS, были предварительно обработаны. В разделе 2.2 предлагается специальный тип сети Автоэнкодер плотности смеси для непосредственного изучения эффективного представления. В разделе 2.3 предлагается гибридная система RNN-HMM для вычисления последовательности меток на основе входных данных. RNN обеспечивает локализованную классификацию каждого элемента последовательности, в то время как HMM сегментирует ввод на основе выходных данных RNN и выводит наиболее вероятную последовательность меток.
2.1. Предварительная обработка событий
Цель этапа предварительной обработки состоит в том, чтобы сделать необработанные данные о событиях неизменными во времени, местоположении и стандартизированными. Наконец, каждое событие было преобразовано из 4-мерного необработанного объекта в 6-мерный предварительно обработанный объект в конце (см. Уравнение 2).
Чтобы сделать последовательность событий неизменной во времени, была введена новая переменная δ t , которая определяется как время, прошедшее с момента предыдущего события, т. е. δ t ( i ) = t ( i ) − t ( i −1) со значением 0 в качестве базового случая. Таким образом была заменена произвольная временная метка предыдущего события.
Чтобы сделать данные инвариантными к местоположению, мы отслеживаем среднее значение μ x x с экспоненциально затухающими весами, что придает больший вес недавним событиям и может быть легко вычислено в потоковом контексте, таком как онлайн-распознавание. мк x , который отслеживает количество x в течение непрерывного времени, определяется как
µx(i)=(1-αt(i)-t(i-1))·x(i)+αt(i)-t(i -1)·μx(i-1) (1)
, где x ( i ) наблюдалось в момент времени t ( i ) . Параметр α определяет, какой вес придается прошлым данным.
Мы сохраняем два средних значения для каждого из x и y , одно с λ = 1 с, а другое с λ = 50 мс. Первый должен был отслеживать основное движение руки, а второй должен был отслеживать быстрое движение отдельных пальцев.
В общем, предварительная обработка сопоставляла каждое событие из 4-мерного необработанного объекта с 6-мерным объектом следующим образом
(t(i),x(i),y(i),p(i))↦( δt(i),δxλ=1s(i),δxλ=50 мс(i),δyλ=1s(i),δyλ=50 мс(i),p(i)) (2)
, где δxλ=1s(i) =x(i)- µx,λ=1s(i), δxλ=50 мс(i)=x(i)-µx,λ=50 мс(i),δyλ=1s(i)=y(i)-µy, λ=1s(i), δyλ=50 мс(i)=y(i)-µy,λ=50 мс(i).
2.2. Обучение представлению для FLGR
Цель этапа обучения представлению сосредоточена на изучении функции из последовательности событий переменной длины. Сеть смешанной плотности, соответствующая архитектуре автоэнкодера, предложенной в Cho et al. (2014), который изначально использовался для машинного перевода. И энкодер, и декодер автоэнкодера плотности смеси состоят из Gated Recurrent Units (GRU). Представления, изученные автоэнкодером, называются Представление Gist фиксированной длины (FLGR) . Во-первых, FLGR кодирует суть ввода. Во-вторых, последовательности событий фиксированной продолжительности переменной длины преобразуются в вектор фиксированной длины с обучением представлению. Мы надеемся вдохновить на более активные усилия в направлении исследований нейроморфного зрения, основанных на ненакопленных изображениях.
2.2.1. Автоэнкодер плотности смеси
Целью автоэнкодера плотности смеси является изучение низкоразмерного представления входных данных, из которого он может впоследствии восстановить входные данные. Грейвс (2013) предложил сеть смешанной плотности для создания последовательности рукописного ввода из обученной сети путем изучения распределения входной последовательности. Свойство сети смешанной плотности было использовано, чтобы заставить автоэнкодер преобразовывать последовательности событий переменной длины фиксированной продолжительности в векторы фиксированной длины.
Сеть автоэнкодера была разделена на кодировщик и декодер, обмениваясь информацией только по одному ребру вычислительного графа (см. рис. 2). Это ребро инициализирует скрытое состояние декодеров окончательным скрытым состоянием кодировщика. Это образная воронка в сети, поскольку она должна кодировать полную входную последовательность. Автоэнкодер плотности смеси был обучен производить распределение вероятностей по последовательностям, а не по последовательностям напрямую. Наша сеть обработала входную последовательность длиной n , где n является переменной, путем кодирования сначала полной последовательности. Впоследствии он использовал декодер для получения распределения по последовательности длиной n и вычисления потерь между двумя последовательностями для обучения. Выходные данные сетей смешанной плотности параметризуют распределение, которое представляет собой смесь гауссианов по вещественному атрибуту и распределения Бернулли по категориальному атрибуту. Примечательно, что выходами нашего автоэнкодера плотности смеси являются параметры распределения смеси, соответствующие входной последовательности событий. Эти параметры были использованы для реконструкции последовательности. Во время обучения мы используем кодировщик вместе в качестве автокодировщика для последовательности и получаем обучающий сигнал из ошибки реконструкции последовательности. Затем мы выбрасываем декодер и полагаемся исключительно на кодировщик для создания обогащенного, изученного представления FLGR.
Рисунок 2 . Схема нашей архитектуры автоэнкодера, которая кодирует входную последовательность x длиной n в скрытые состояния e . Декодер обучен декодировать последнее скрытое состояние e ( n ) в последовательность y (1) , …, y ( n 4 ), напоминающую ввод . Каждый y ( i ) является неотрицательным вектором, сумма элементов которого равна 1, а его j -я запись кодирует мнение сети о том, что j -е слово должно быть размещено в этой точке выходной последовательности. Важнейшее свойство нашей рекуррентной модели относится к способности работать с последовательностью входных событий. В предлагаемом автоэнкодере смешанной плотности и кодер, и декодер состоят из трех уровней GRU. Хотя в работах по кодированию и классификации последовательностей часто используются ячейки долговременной кратковременной памяти (LSTM), сообщалось, что архитектура на основе GRU, демонстрирующая немного лучшую производительность, более надежна в более широком диапазоне гиперпараметров и имеет меньше параметров, что предполагает немного более быструю обучение и лучшая производительность во время тестирования. Это согласуется с эмпирическими результатами предыдущей работы над глубоко рекуррентными моделями в других областях (Jozefowicz et al., 2015). ГРУ объединило состояние ячейки со скрытым состоянием h ( t ) , объединил вентили ввода и забывания в один вентиль обновления z ( t ) и заменил вентиль вывода на вентиль сброса r без эквивалента в LSTM. Таким образом, на каждом временном шаге t мы брали скрытое состояние h ( t ) конечного уровня GRU на рекуррентном этапе в качестве кодирования последовательности, где h ( t ) определяется как: r(t)=σ(Wrx(t)+Urh(t−1)) (3) z(t)=σ(Wzx(t)+Uzh(t −1)) (4) h˜(t)=tanh(Wx(t)+U(r(t)◦h(t−1))). (5) h(t)=z(t)◦h(t−1)+(1−z(t))◦h˜(t) (6) Целью временной классификации было преобразование последовательности событий в последовательность из 17 меток жестов. Ву и др. (2018) обучили управляемую событиями RNN на наборе данных DVS-MNIST, проверив способность RNN обрабатывать задачу классификации на основе событий. RNN, состоящие из блоков LSTM или блоков GRU, являются эффективными методами непрерывного распознавания жестов (Chai et al. Цель классификации последовательностей состояла в том, чтобы взять входную последовательность и произвести распределение меток. RNN использовали для классификации последовательности событий. На рисунке 3 показана структура нашей сети RNN. RNN состоит из трех слоев GRU, двух полносвязных слоев с активацией tahn и, наконец, полносвязного слоя, который проецирует выходные данные в ℝ 17 . Определение GRU и причина выбора GRU вместо других повторяющихся единиц, таких как LSTM, объясняются в разделе 2.2.2. В нашем классификаторе последовательности RNN скорость обучения, скорость распада и количество нейронов каждого GRU были установлены на 10 -3 , 0,95 и 256 соответственно. Функция потерь представляет собой перекрестную энтропию, измеряющую разницу между метками и прогнозируемыми выходными данными. Рисунок 3 . Сеть RNN состоит из трех слоев GRU, каждый из которых имеет N единиц, т. е. 256 единиц в нашей настройке. Вывод RNN преобразуется с помощью Softmax для параметризации распределения по классам. Наконец, сеть можно обучить для получения прогноза y. Выходные данные классификатора последовательности показаны на рисунке 4. Поскольку пустой класс занял почти 50% обучающих данных, классификатор распознал данные, не связанные с жестами, с высокой точностью. Когда активность была обнаружена, классификатор сначала присваивал высокие вероятности нескольким классам, пока не распознал одну метку как правильную. Рисунок 4 . Вероятности классов, полученные из классификатора последовательности RNN. Заштрихованные области на заднем плане обозначают наземную правду (лучше всего смотреть в цвете). Основной целью нашего HMM является обработка зашумленной классификации, произведенной классификатором последовательности. Классификатор последовательности с RNN указывает, какой жест, скорее всего, происходит в каждый момент времени. Однако существует огромное количество зашумленных классификаций, созданных классификатором последовательностей RNN (см. рис. 5). Например, жест прокрутки вниз может быть классифицирован как поворот наружу в течение первых нескольких миллисекунд, затем проведите пальцем вверх по , чтобы открыть еще несколько, и, наконец, как , проведите вниз по , чтобы просмотреть остальные действия. Кроме того, эта последовательность вероятностных распределений должна быть расшифрована в одну метку , которую можно пролистать вниз . Решение было достигнуто с помощью декодирования HMM (HMM decoder). Рисунок 5 . Шумные классификации, созданные классификатором RNN (лучше всего смотреться в цвете). HMM состоит из цепи Маркова скрытых состояний z ( t ) ∈ {1, …, K }, модель наблюдения x ( t ) и модель перехода, выраженная как матрица перехода A . HMM моделирует ситуацию, когда интересующее состояние можно наблюдать только косвенно через выбросы на каждом временном шаге. У нас есть последовательность локальных классификаций каждого кадра по 17 классам, и мы хотели бы получить истинную лежащую в основе последовательность жестов. HMM помогает нам включить знание о том, что состояние i может наблюдаться как любое другое состояние в течение короткого времени через матрицу наблюдения B. Эффективный алгоритм декодирования Витерби был использован для декодирования последовательности наблюдения в наиболее вероятную последовательность основного состояния. Декодирование Витерби дает наиболее вероятную последовательность скрытых состояний z(1),…,z(n)=arg maxz(1),…,z(n)p(z(1),…,z(n) )|x(1),…,x(n)) (7) =arg maxz(1),…,z(n)p(z(1))·∏t=2np(z(t)| z(t−1))·∏t=1np(x(t)|z(t)) (8) =arg maxz(1),…,z(n)log πz(1)+∑t= 2nlog Az(t−1),z(t)+∑t=1nlog p(x(t)|z(t)) (9) задана последовательность наблюдений. =arg maxz(1),…,z(n)log πz(1)+∑t=2nlog Az(t−1),z(t) +∑t=1n(log p(z(t|x (t))+log p(x(t))−log p(z(t))) (10) Член p(x(t)) не имеет отношения к Argmax, поскольку он не зависит от z . =arg maxz(1),…,z(n)log πz(1)+∑t=2nlog Az(t−1),z(t) +∑t=1n(log p(z(t| x(t))−log p(z(t))) (11) =arg maxz(1),…,z(n)log πz(1)+∑t=2nlog Az(t−1),z(t) +∑t=1nlog p(z(t|x(t) )) (12) Алгоритм Витерби находит максимизатор путем вычисления вероятности пребывания в состоянии j в момент времени t , поскольку выбран наиболее вероятный путь δt(j)=maxz(1),… ,z(t−1)p(z(1),…,z(t−1),z(t)=j|x(1),…,x(t)) (13) Ключевое понимание здесь заключается в том, что наиболее вероятный путь к состоянию j в момент времени t должен быть таким, который максимизирует совместную вероятность пребывания в состоянии k 91 521 в момент времени 91 520 t 91 521 − 1 и переход от 91 520 k 91 521 к 91 520 j 91 521 , т. 91 243 Если вычислить δ для t от 1 до n и сохранить максимизатор i в другой таблице α tj , можно найти наиболее вероятное конечное состояние как z(n)=arg maxiδn(i) и вернитесь к t = 1, следуя αn,z(n) до предшествующего состояния и так далее. Это объяснение взято из Мерфи (2012). Поскольку матрица наблюдения B может быть получена из выходных данных классификатора RNN со слоем SoftMax, процесс построения декодера HMM был сокращен до нахождения A и π. На рис. 6А показано, что декодер HMM способен распознавать точки активности в последовательности локальных классификаций, а также достаточно точно декодировать их в истинную метку. Рисунок 6 . Сравнение двух методов декодирования на одной записи. Заштрихованные области на заднем плане обозначают наземную правду (лучше всего смотреть в цвете). (A) Прямой декодер HMM. (B) Сегментатор HMM плюс декодирование сегментов. Однако было много ложных меток, смешанных с истинными метками (см. рис. 6А). Чтобы решить проблему смешивания, был разработан сегментатор HMM, а процесс декодирования был разделен на две части: во-первых, HMM только с двумя состояниями, жест и пустой , сегментирует последовательность; впоследствии второй HMM создает одну метку для каждого сегмента. Сегментатор HMM был сконструирован так же, как и декодер с той изюминкой, что все жесты объединяются в одно скрытое состояние жест . Когда HMM сегментирует запись, вероятность состояния жестов представляет собой сумму вероятностей всех жестов. Чтобы подавить оставшиеся ложные активации, все сегменты короче 500 мс также были отфильтрованы, поскольку мы знаем из статистики набора данных, что самый короткий жест в среднем длится более секунды согласно статистике набора данных. Рисунок 6B показывает, что загрязнение этикеток для смешивания почти исчезло по сравнению с результатом на рисунке 6A. Целью процесса обучения является оценка параметров модели в нашей архитектуре. Во время обучения мы использовали кодировщик и декодер вместе в качестве автокодировщика плотности смеси. Мы реконструировали последовательность с помощью распределения смеси, выдаваемого автоэнкодером. Мы получаем обучающий сигнал из ошибки восстановления последовательности. Кодирующая часть обученного кодера-декодера использовалась для генерации данных FLGR из последовательности переменных событий. Учитывая последовательность FLGR, гибридная система с классификатором RNN и HMM была обучена предсказывать соответствующую метку. Сегмент и пакет обучающих событий были сгенерированы следующим образом: временное окно T w с фиксированной продолжительностью было построено как сегмент. События попадали в разные T w с переменной длиной L i . В нашей реализации процедура обучения автоэнкодера плотности смеси выглядит следующим образом. И кодировщик, и декодер представляют собой 3 уровня GRU с 256 нейронами в каждом. Кодер получает предварительно обработанные события в ℝ 6 . Декодер выдает параметры для 10-компонентного распределения смеси гауссианов с диагональными ковариационными матрицами на ℝ 5 и один параметр для распределения Бернулли по {−1, 1}. Для классификатора последовательности RNN скорость обучения, скорость распада и количество нейронов каждого GRU были установлены на 10 -3 , 0,95 и 256 соответственно. Построение декодера HMM из обучающих данных для нахождения A и π. Определим A i , 17 записей, вероятность перехода от жеста i к пробелу , как долю кадров, принадлежащих классу i , которые переходят в пробел и A i, i , вероятность самоперехода, как 1 − Ai , 17. Вероятность перехода из пробел к любому из жестов был долей жестов, следующих за пустыми смыслами, а вероятность самоперехода выступала в качестве дополнительной части. Для платформы программирования для обучения, обработки и реализации использовались графическая карта Titan X и процессор Intel Core i7-5930K. В этом разделе должны быть описаны набор данных нейроморфных непрерывных жестов (Neuro ConGD) и протокол оценки. Набор данных содержит необработанные записанные события и предварительно обработанные данные. В последние годы было создано множество наборов данных о жестах, что подробно описано в Ruffieux et al. (2014). Большинство наборов данных было записано с помощью покадровой камеры, например, обычной цветной камеры, стереокамеры и Kinect. Ху и др. (2016) сообщили о срочной необходимости в наборе нейроморфных данных для дальнейших исследований событийного компьютерного зрения. Одним из вкладов этого исследования является то, что новый набор данных нейроморфных непрерывных жестов (Neuro ConGD) был собран с помощью камеры, основанной на событиях. Набор данных NeuroConGD был записан с помощью датчика DVS с пространственным разрешением 128×128 пикселей. Сначала следует выбрать подходящее расстояние между рукой и DVS, чтобы жест можно было отличить от шума. На рис. 7 показана частота событий для трех записей, сделанных на трех разных расстояниях между рукой и DVS. Рисунок 7 . Плотность событий для различных расстояний между рукой и DVS. Шестнадцать классов жестов были определены с дополнительным пустым классом , как указано в таблице 1. Набор данных Neuro ConGD включает 2040 экземпляров набора из 17 жестов, записанных в случайном порядке. Набор данных Neuro ConGD был разделен на 3 взаимоисключающих подмножества, а именно набор для обучения, проверки и тестирования. Тренировочный набор выполняли 4 испытуемых. Проверочный набор был выполнен двумя субъектами. Таблица 1 . Информация о наборе данных Neuro ConGD. Рисунок 8 . Обзор набора данных, демонстрирующий 16 жестов, каждый из которых содержит 4 субфигуры с разными временными метками (лучше всего смотреть в цвете). Было разработано специальное программное обеспечение для маркировки, и каждая запись была вручную аннотирована путем маркировки списка временных меток начала и окончания для каждого жеста именем класса жестов. Индекс Жаккара предназначен для измерения среднего относительного перекрытия между фактической и прогнозируемой последовательностями временных меток для данного жеста (Pigou et al. Обратите внимание, что это набросок для интуитивного понимания. И кодер, и декодер имеют 3 уровня GRU отдельно. Подробности реализации можно увидеть в разделе 2.4. 2.2.2. Gated Recurrent Unit
2.3. Гибрид RNN-HMM для временной классификации
, 2016; Cui et al., 2017). Кроме того, гибридная система в сочетании с нейронной сетью и скрытой марковской моделью (HMM) значительно повысит эффективность временной классификации (Abdel-Hamid et al., 2012; Gaikwad, 2012). На основе приведенной выше информации был разработан гибрид RNN-HMM для временной нейроморфной классификации непрерывных жестов. Наш гибрид RNN-HMM состоит из двух модулей: классификация последовательности с RNN для создания распределения меток и HMM для декодирования распределения меток в правильную метку жеста. Хотя это исследование сосредоточено на распознавании жестов, мы надеемся вдохновить на дополнительные усилия по задачам нейроморфной временной классификации на основе предложенного гибрида RNN-HMM. 2.3.1. Классификация последовательностей с рекуррентной нейронной сетью
Чтобы классифицировать непрерывную последовательность жестов, необходимо было декодировать локализованные классификации в глобальные классификации. Другими словами, сеть должна назначать каждую единицу входной последовательности FLGR одному из 17 классов. 17 классов содержат 16 жестов плюс пустая метка (см. определение классов жестов в разделе 3.1). Выходные данные преобразуются с помощью SoftMax для параметризации мультинулли-распределения по выходным классам. 2.
3.2. Декодирование и сегментация HMM Поскольку классификатор RNN со слоем softmax выдает p(z(t)|x(t)) вместо p(x(t)|z(t)), цель декодирования можно переписать в соответствии с теоремой Байеса. е. Таким образом, результаты улучшились после внедрения сегментатора HMM. 2.4. Обучение и внедрение сети
Затем максимальное значение L i среди различных T w было вычислено как L max . Каждая партия содержит несколько T w с размером партии S . Окончательные данные партии имеют форму ( S партия , L MAX , S Event ) S Event ). размер в каждом обрабатываемом событии. В нашем обучении T w , S пакет и S событие были установлены на 2,5 мс, 32 и 6 соответственно. Это добавляет до 10 весов компонентов, 10·5 = 50 средних параметров, 10·5 = 50 элементов диагональной матрицы конвариантности и один параметр Бернулли, всего 111 параметров. Чтобы проецировать свой 256-мерный вывод в ℝ 111 , декодер имеет один полносвязный слой с весовой матрицей и членом смещения, но без нелинейности сверху. В соответствии с выходным распределением потеря представляет собой отрицательную логарифмическую вероятность входной последовательности. Веса сети изучаются с использованием градиента мини-пакетов, приличного размера пакета 32. Оптимизатором является Адам (Kingma and Ba, 2015) со скоростью обучения 10 −4 и скорость экспоненциального затухания 0,95 в степени текущей эпохи. Градиенты были обрезаны по норме 5. Это также помогает решать числовые нестабильности, если ковариации распределения смеси становятся очень малыми. Функция потерь представляла собой перекрестную энтропию, измеряющую разницу между метками и прогнозируемыми результатами. 3. Эксперименты
Экспериментальные результаты предлагаемого метода на этом наборе данных были представлены и сравнены с базовыми уровнями. 3.1. Набор данных Neuro ConGD
Частота шумовых событий около 8 keps была измерена, когда DVS был направлен на статичную сцену, что является базовой частотой между жестами независимо от расстояния. Пики частоты событий показывают, что частота событий выше исходного уровня пропорциональна расстоянию между рукой и DVS. Однако из-за небольшого расстояния жест рукой уходит из поля зрения DVS, а записи с расстояния более 80 см почти неотличимы от шумов. Соответственно, дистанция выдерживалась от 40 до 50 см. Набор тестов также был выполнен двумя субъектами. Жесты включают в себя поманивание, щелчок пальцем, ОК, нажатие рукой (вниз, влево, вправо, вверх), вращение наружу, пролистывание (влево, вправо, вверх), касание-указатель, поднятие большого пальца вверх, масштабирование (приближение, удаление). ) (см. рис. 8). 3.2. Метрики оценки
3.2.1. Средний индекс Жаккара для общей эффективности распознавания
, 2018; Wang et al., 2018). Для последовательности s пусть G s, i и P s, i будут бинарными индикаторными векторами, для которых 1-значения соответствуют временным меткам, в которых1520-й
0 S .
Для всех тестовых последовательностей S = с 1 , …, с n с 17 жестами средний индекс Жаккара JS¯ служит критерием оценки и рассчитывается по формуле:0009
JS¯=1n∑j=1nJsj (17)
3.
2.2. F-Score for Detection Performance
Одной из трудностей непрерывного распознавания жестов является определение начальной и конечной точек времени жеста. Для сегментированного распознавания жестов сценарий проблемы можно резюмировать как классификацию четко очерченной последовательности видеокадров как одного из набора типов жестов. Это контрастирует с непрерывным распознаванием человеческих жестов, где нет заранее заданных границ выполнения жестов. Это требует, чтобы система различала пустой и непустой класс (жесты) в каждый момент времени. Для оценки эффективности обнаружения мы сохраняем пустой класс и объединить остальные 16 жестов в один класс как Ges . Затем задача теперь состоит в том, чтобы обнаруживать непустые жесты, не распознавая конкретный вид класса. В предсказании и наземной истине значения пробела и Ges равны 0 и 1 соответственно. Впоследствии показатель F-score (Sokolova and Lapalme, 2009) определяется как:
F-балл = 2* Точность * Отзыв Точность + Отзыв (18)
3.
3. Экспериментальные результаты
Чтобы проиллюстрировать эффективность представления FLGR, был разработан базовый уровень, в котором классификатор последовательности RNN обучается с помощью последовательностей событий переменной длины. Были оценены предложенные рамки с протоколом среднего индекса Жаккара JS¯ и Fscore , и они были сравнены с исходным уровнем.
В таблице 2 показаны окончательные результаты для комбинаций входного представления и метода декодирования. Была разработана базовая линия RNN с входными данными последовательностей событий. В случае базового уровня точность JS¯ составила 63,3 %, что является разумным и приемлемым, но все же сложным. Базовый случай подтвердил фундаментальные возможности нашей сети RNN в распознавании, управляемом событиями. Наша архитектура была улучшена на основе представления FLGR и позднего декодирования HMM. После изучения представления FLGR точность JS¯ была улучшена более чем на 15%. Fscore для результата обнаружения был улучшен до 94,4%. Наилучший результат был достигнут при обучении представления FLGR с помощью классификатора RNN и метода декодирования с дополнительным шагом сегментации. Средние значения лучших JS¯ и Fscore были до 86,9 и 96,6% соответственно. Для случаев среди FLGR точность JS¯ также улучшается более чем на 8% после применения сегментатора HMM. В таблице 2 показано значительное улучшение после применения представления FLGR, которое подтверждает повышенную эффективность представления FLGR для обучения классификатора последовательностей.
Таблица 2 . Производительность измерялась на тестовом наборе данных со средним значением Jaccard Index JS¯ и Fscore .
4. Заключение и обсуждение
В этом исследовании была предложена нейроморфная система распознавания непрерывных жестов, и было проанализировано, как она может извлечь выгоду из обучения представлению FLGR и гибрида RNN-HMM. Был представлен новый метод обучения представлению для изучения представления FLGR без накопления кадров из потоков событий DVS. Гибрид RNN-HMM был предложен для классификации последовательностей на основе событий. Был создан новый помеченный набор данных нейроморфных непрерывных жестов Neuro ConGD с более чем 2040 экземплярами 17 классов жестов из 120 последовательностей событий. В качестве основы был разработан классификатор RNN, а архитектура с еще тремя различными путями в нашем наборе данных была улучшена. Согласно экспериментальным результатам, мы смогли достичь JS¯ 86,9.% для производительности распознавания и в среднем Fscore 96,6% для производительности обнаружения, с автоэнкодером плотности смеси для обучения представлению FLGR, RNN для классификации последовательностей и процесса сегментации HMM.
По сравнению с традиционным представлением потоков событий DVS на основе накопленных кадров, FLGR отмечает два основных преимущества: во-первых, FLGR представляет собой последовательность, полученную из автокодировщика смешанной плотности, и лучше сохраняет природу данных, основанных на событиях. Во-вторых, FLGR имеет формат данных фиксированной длины, и его легко передать в классификатор последовательности. Имея предварительный результат в этой работе, мы считаем, что наше обучение представлению FLGR и гибрид RNN-HMM, как полагают, имеют большой потенциал для переноса в нейроморфное зрение в других задачах распознавания образов и классификации последовательностей. Мы надеемся вдохновить исследования задач классификации последовательностей на основе событий с представлением на основе ненакопленных кадров.
Есть еще несколько способов повысить эффективность распознавания этой системы. Одна из идей состоит в том, чтобы увеличить информативность усвоенных репрезентаций в периоды низкой плотности событий. Затем состояние автоэнкодеров сбрасывалось на ноль между каждым временным окном. Это можно улучшить, используя автоэнкодер в скользящем режиме, не сбрасывая скрытые состояния между временными окнами. Это может помочь классифицировать отрезки времени в жестах с низкой активностью, например, поворотный момент жеста смахивания. Другой идеей было бы использовать двунаправленную нейронную сеть, чтобы последующие полностью связанные слои могли учитывать как прошлый, так и будущий контекст и избегать фазы путаницы в начале жеста. которые могут включать такие требования, как минимальная длина скрытого состояния, непосредственно в модель вместо последующей обработки декодирования и сегментации.
Вклад авторов
GC, JNC и ML внесли равный вклад в эту работу. GC, JNC, ML, JC, FR и AK занимались концепцией и дизайном, анализом и интерпретацией данных, составлением проекта и редактированием статьи. ML и GC провели эксперименты и получили данные. JC предоставил датчик динамического зрения.
Финансирование
Эта работа была поддержана Немецким исследовательским фондом (DFG) и Мюнхенским техническим университетом (TUM) в рамках программы публикации открытого доступа. Исследование, приведшее к этим результатам, частично финансировалось Шанхайской программой научно-технического развития автомобильной промышленности в соответствии с Соглашением о гранте № 1838, а также Программой исследований и инноваций Европейского Союза Horizon 2020 в соответствии с Соглашением о гранте № 7859. 07 (HBP SGA2) и Фонда фундаментальных исследований центральных университетов Тунцзи.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Ссылки
Абдель-Хамид О., Мохамед А. Р., Цзян Х. и Пенн Г. (2012). «Применение концепций сверточных нейронных сетей к гибридной модели nn-HMM для распознавания речи», в Международная конференция IEEE по акустике, обработке речи и сигналов (ICASSP) (Киото: IEEE), 4277–4280, 2012 г.
Google Scholar
Aggarwal, JK, and Ryoo, M.S. (2011). Анализ деятельности человека: обзор. ACM вычисл. Surv. 43:16. doi: 10.1145/1
9.1
3
Полный текст CrossRef | Google Scholar
Ан, Э. Ю., Ли, Дж. Х., Маллен, Т., и Йен, Дж. (2011). «Распознавание жестов голыми руками на основе камеры с датчиком динамического зрения», в Симпозиум IEEE 2011 г. по вычислительному интеллекту для мультимедиа, обработки сигналов и изображений (CIMSIVP) (Париж: IEEE), 52–59.
Google Scholar
Амир А., Таба Б. и Берг Д. (2017). «Система распознавания жестов с низким энергопотреблением, полностью основанная на событиях», в IEEE Conference on Computer Vision and Pattern Recognition (Гонолулу, Гавайи).
Google Scholar
Бардоу П., Дэвисон А. Дж. и Лойтенеггер С. (2016). «Одновременная оценка оптического потока и интенсивности с камеры событий», в Материалы конференции IEEE по компьютерному зрению и распознаванию образов (Лас-Вегас, Невада), 884–892.
Google Scholar
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza, D., Neira, J., et al. (2016). Прошлое, настоящее и будущее одновременной локализации и картирования: к эпохе устойчивого восприятия. IEEE Trans. Робот. 32, 1309–1332. doi: 10.1109/TRO.2016.2624754
Полный текст CrossRef | Google Scholar
Чай X. , Лю Z., Инь Ф., Лю Z. и Чен X. (2016). «Двухпоточные рекуррентные нейронные сети для крупномасштабного непрерывного распознавания жестов», в 2016 23-я Международная конференция по распознаванию образов (ICPR) (Канкун: IEEE), 31–36.
Google Scholar
Чо К., ван Мерриенбоер Б., Гюльчере Ч., Бахданау Д., Бугарес Ф. и др. (2014). Изучение представлений фраз с использованием кодировщика-декодера rnn для статистического машинного перевода. в материалах конференции 2014 г. по эмпирическим методам обработки естественного языка (EMNLP) (Доха: Ассоциация компьютерной лингвистики), 1724–1734.
Google Scholar
Цуй, Р., Лю, Х., и Чжан, К. (2017). «Рекуррентные сверточные нейронные сети для непрерывного распознавания языка жестов путем поэтапной оптимизации», в IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Гонолулу, Гавайи).
Google Scholar
Дельбрюк, Т., и Ланг, М. (2013). Роботизированный вратарь с временем реакции 3 мс при загрузке процессора 4% с использованием датчика динамического зрения на основе событий. Фронт. Неврологи. 7:223. дои: 10.3389/fnins.2013.00223
Резюме PubMed | Полный текст перекрестной ссылки | Google Scholar
Гайквад, К. (2012). Классификатор HMM для распознавания человеческой деятельности. Вычисл. науч. англ. 2:27. doi: 10.5121/cseij.2012.2403
Полный текст CrossRef | Google Scholar
Герстнер В. и Кистлер В. М. (2002). Модели спайковых нейронов: одиночные нейроны, популяции, пластичность. Энциклопедия Neurosci. 4, 277–280. doi: 10.1017/CBO9780511815706
Полный текст CrossRef | Академия Google
Грейвс, А. (2013). Генерация последовательностей с рекуррентными нейронными сетями. Препринт arXiv arXiv:1308.0850 .
Google Scholar
Хохрайтер С. и Шмидхубер Дж. (1997). Длинная кратковременная память. Нейронные вычисления. 9, 1735–1780 гг.
Реферат PubMed | Google Scholar
Ху, Ю., Лю, Х., Пфайффер, М., и Дельбрюк, Т. (2016). Наборы эталонных данных DVS для отслеживания объектов, распознавания действий и распознавания объектов. Фронт. Неврологи. 10:405. doi: 10.3389/fnins.2016.00405
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Цзи С., Сюй В. и Ян М. (2013). Трехмерные сверточные нейронные сети для распознавания действий человека. EEE Транс. Анальный узор. Машинный интеллект. 35, 221–231. doi: 10.1109/TPAMI.2012.59
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Йозефович Р., Заремба В. и Суцкевер И. (2015). «Эмпирическое исследование рекуррентных сетевых архитектур», в 915:20 Международная конференция по машинному обучению 91 521 (Лилль), 23:42–23:50.
Google Scholar
Кингма, Д., и Ба, Дж. (2015). «Адам: метод стохастической оптимизации», Международная конференция по обучающим представлениям (ICLR) (Сан-Диего, Калифорния).
Google Scholar
Ноллер, Н., Вольф, К.В., Тейлор, Г., и Небут, Ф. (2016). «Глубокая рука: как обучить cnn на 1 миллионе изображений рук, когда ваши данные непрерывны и слабо помечены», в Конференция компьютерного общества IEEE по компьютерному зрению и распознаванию образов (Лас-Вегас, Невада), 3793–3802.
Google Scholar
Крижевский А., Суцкевер И. и Хинтон Г. Э. (2012). «Классификация Imagenet с помощью глубоких сверточных нейронных сетей», в Advances in Neural Information Processing Systems, NIPS 2012 , изд. П. Бартлетт (Lake Tahoe, NV: Curran Associates, Inc.) 1097–1105.
Google Scholar
Lee, J., Delbruck, T., Park, P.K., Pfeiffer, M., Shin, C.-W., Ryu, H., et al. (2012а). «Живая демонстрация: дистанционное управление на основе жестов с использованием стереопары датчиков динамического зрения», в Международный симпозиум IEEE по схемам и системам (ISCAS), 2012 г., (Сеул: IEEE), 741–745.
Google Scholar
Lee, J.H., Delbruck, T., Pfeiffer, M., Park, P.K., Shin, C.W., et al. (2014). Интерфейс жестов в реальном времени, основанный на управляемой событиями обработке стерео-кремниевых сетчаток. IEEE Trans. Нейронная сеть. Учиться. Сист. 25, 2250–2263. doi: 10.1109/TNNLS.2014.2308551
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Lee, J. H., Park, P. K., Shin, C.-W., Ryu, H., Kang, B. C., and Delbruck, T. (2012b). «Пользовательский интерфейс для бесконтактных жестов с мгновенным откликом», в 2012 19-я Международная конференция IEEE по обработке изображений (ICIP) (Орландо, Флорида: IEEE), 1957–1960.
Google Scholar
Лихтштайнер П., Пош К. и Дельбрюк Т. (2008). Асинхронный временной контрастный датчик зрения с задержкой 128 × 128, 120 дБ, 15 мкс. IEEE J. Solid State Circ. 43, 566–576. doi: 10.1109/JSSC.2007.
7
Полный текст CrossRef | Google Scholar
Македа А. И., Локерсио А., Гальего Г., Гарсия Н. и Скарамуцца Д. (2018). «Видение, основанное на событиях, сочетается с глубоким обучением прогнозированию рулевого управления для беспилотных автомобилей», в Материалы конференции IEEE по компьютерному зрению и распознаванию образов (Солт-Лейк-Сити, Юта), 5419–5427.
Google Scholar
Moeys, D. P., Corradi, F., Kerr, E., Vance, P., Das, G., Neil, D., et al. (2016). «Управление роботом-хищником с использованием смешанной сверточной нейронной сети, управляемой кадрами и событиями», в 2016 Вторая международная конференция по управлению, связи и обработке сигналов на основе событий (EBCCSP) (Краков: IEEE), 1–8.
Google Scholar
Молчанов П., Гупта С., Ким К. и Каутц Дж. (2015). «Распознавание жестов рук с помощью трехмерных сверточных нейронных сетей», в Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (Бостон, Массачусетс), 1–7.
Google Scholar
Мюгглер Э., Форстер К., Баумли Н., Гальего Г. и Скарамуцца Д. (2015). «Оценка событий в течение всего срока службы от датчиков динамического зрения», в Международная конференция IEEE по робототехнике и автоматизации (ICRA) 9, 2015 г.1521 (Сиэтл, Вашингтон: IEEE), 4874–4881.
Google Scholar
Mueggler, E., Huber, B., and Scaramuzza, D. (2014). «Отслеживание позы на основе событий с 6 степенями свободы для высокоскоростных маневров», в 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014) (Чикаго, Иллинойс: IEEE), 2761–2768.
Google Scholar
Мунда Г., Рейнбахер К. и Пок Т. (2018). Реконструкция изображения интенсивности в реальном времени для событийных камер с использованием многообразной регуляризации. Междунар. Дж. Вычисл. Вис . 126, 1381–1393. doi: 10.1007/s11263-018-1106-2
Полный текст CrossRef | Google Scholar
Мерфи, К.П. (2012). Машинное обучение: вероятностная перспектива . Кембридж, Массачусетс: MIT Press.
Google Scholar
Нил Д., Пфайффер М. и Лю С. К. (2016). «Поэтапный LSTM: ускорение периодического обучения сети для длинных или основанных на событиях последовательностей», в Advances in Neural Information Processing Systems, NIPS 2016 г., изд. Д. Д. Ли (Барселона: Curran Associates, Inc.), 3882–3890.
Google Scholar
Неверова Н., Вольф К., Тейлор Г. и Небут Ф. (2016). Moddrop: адаптивное мультимодальное распознавание жестов. IEEE Trans. Анальный узор. Мах. Интел. 38, 1692–1706 гг. doi: 10.1109/TPAMI. 2015.2461544
CrossRef Full Text | Google Scholar
Неверова Н., Вольф К., Тейлор Г. В. и Небут Ф. (2014). «Многомасштабное глубокое обучение для обнаружения и локализации жестов», в Семинар на Европейской конференции по компьютерному зрению (Цюрих: Springer), 474–490.
Google Scholar
Он-Бар Э. и Триведи М. М. (2014). Распознавание жестов рук в режиме реального времени для автомобильных интерфейсов: мультимодальный подход и оценки на основе зрения. IEEE Trans. Интел. Транспорт. Сист. 15, 2368–2377. doi: 10.1109/TITS.2014.2337331
CrossRef Полный текст | Google Scholar
Park, P.K., Cho, B.H., Park, JM, Lee, K., Kim, H.Y., Kang, H.A., et al. (2016). «Повышение производительности распознавания жестов на основе глубокого обучения с использованием техники пространственно-временной демозаики», в Международная конференция IEEE по обработке изображений (ICIP), 2016 г. (Феникс, Аризона: IEEE), 1624–1628.
Google Scholar
Пигу Л. , Ван Ден Оорд А., Дилеман С., Ван Херревеге М. и Дамбре Дж. (2018). Помимо временного объединения: повторение и временные свертки для распознавания жестов в видео. Междунар. Дж. Вычисл. Вис. 126, 430–439. doi: 10.1007/s11263-016-0957-7
CrossRef Full Text | Google Scholar
Руфье С., Лаланн Д., Муджеллини Э. и Халед О. А. (2014). «Обзор наборов данных для распознавания жестов человека», в Международная конференция по взаимодействию человека и компьютера (Ираклион: Спрингер), 337–348.
Google Scholar
Синха А., Чой К. и Рамани К. (2016). «Deephand: надежная оценка позы руки путем заполнения матрицы, вмененной глубокими функциями», в Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Лас-Вегас, Невада), 4150–4158.
Google Scholar
Соколова М. и Лапальме Г. (2009). Систематический анализ показателей эффективности для задач классификации. Информ. Процесс. Управлять. 45, 427–437. doi: 10. 1016/j.ipm.2009.03.002
Полный текст CrossRef | Google Scholar
Видаль А. Р., Ребек Х., Хорстшефер Т. и Скарамуцца Д. (2018). Окончательный удар? объединение событий, изображений и иму для надежного визуального удара в HDR и высокоскоростных сценариях. Робот IEEE. Автомат. лат. 3, 994–1001. doi: 10.1109/LRA.2018.2793357
Полный текст CrossRef | Google Scholar
Ван П., Ли В., Огунбона П., Ван Дж. и Эскалера С. (2018). Распознавание движения человека на основе RGB-D с глубоким обучением: опрос. вычисл. Вис. Изображение Понять . 171, 118–139. doi: 10.1016/j.cviu.2018.04.007
Полный текст CrossRef | Google Scholar
Ву, Д., Пигу, Л., и Киндерманс, Питер-Ян (2016). Глубокие динамические нейронные сети для мультимодальной сегментации и распознавания жестов. IEEE Trans. Анальный узор. Машинный интеллект. 38, 1583–1597.
Реферат PubMed | Google Scholar
Ву, Ю., Дэн, Л., Ли, Г., Чжу, Дж., и Ши, Л. (2018). Пространственно-временное обратное распространение для обучения высокопроизводительных импульсных нейронных сетей. Фронт. Неврологи. 12:331. doi: 10.3389/fnins.2018.00331
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
FLGR — Является ли цена акций достойным вложением? Учить больше.
$17,02
0,14 (-0,82%)
-0,14 (-0,82%)
Зарегистрируйтесь, чтобы увидеть
Рейтинги… БЕСПЛАТНО!
У нас есть 5 различных рейтингов для каждого ETF, чтобы помочь вам
оценить его будущий потенциал. Вы можете разблокировать все это прямо сейчас. Просто нажмите на ссылку
выше.
Купи и держи
NA
Добавить FLGR в список наблюдения
Зарегистрироваться
Категория: Европейские фондовые индексные фонды
Рейтинг
из 80
в категории
Видеть
Все ETF на покупку с рейтингом «А»
ПОЛУЧИТЕ ОЦЕНКИ МОЩНОСТИ.
.. БЕСПЛАТНО!
FLGR Диаграмма курса акций Интерактивная диаграмма >
FLGR Статистика Цена/Объем — 7 лучших ETF для СЛЕДУЮЩЕГО бычьего рынка
| Текущая цена | 17,02 $ | 52-недельный максимум | 27,08 $ |
| Пред. Закрыть | 17,16 $ | 52-недельный минимум | $16,47 |
| Дневной минимум | $16,97 | Объем | 7 240 |
| Высокий день | 17,10 $ | Сред. объем | 4 485 90 540 |
| 50-дневная скользящая средняя | $17,69 | Дивидендная доходность | 4,94% |
| 200-дневная скользящая средняя | 21,25 $ |
Franklin FTSE Germany ETF (FLGR) ETF Bio
Инвестиционная цель Franklin FTSE Germany ETF заключается в отслеживании инвестиционных результатов индекса, состоящего из немецких акций.
Самые популярные истории
Посмотреть все
Информация о ETF FLGR
| Эмитент | Франклин Темплтон |
| Коэффициент расходов | 0,09% |
| Базовый индекс | Ограниченный индекс FTSE Германии |
| Класс активов | Капитал |
| Сектор | Европейские фондовые ETF |
| Активы под управлением (AUM) | 11. 14М |
| Стоимость чистых активов (СЧА) | 17,14 $ |
| Опции? | Да |
| Всего холдингов | 85 |
FLGR Топ Холдингс
| Символ | Компания | % от общего числа |
| SAP | SAP SE | 8,96% |
| АЛВ | АЛЬЯНС | 6,45% |
| ДТЭ | ДОЙЧЕ ТЕЛЕКОМ АГ РЕГ. |