
Содержание
Разведение рук в тренажере (обратные разведения) техника
021.1к.В закладки: Ctrl+D, Cmd+D
4.4
(34)
FitNavigator.ru/ редакция
Материал подготовлен командой сайта при поддержке наших экспертов: спортсменов, тренеров и специалистов по питанию.
Содержание статьи
- Время на чтение: 3 мин.
- Работающие мышцы и способы хвата
- Исходное положение
- Техника выполнения
- Рекомендации
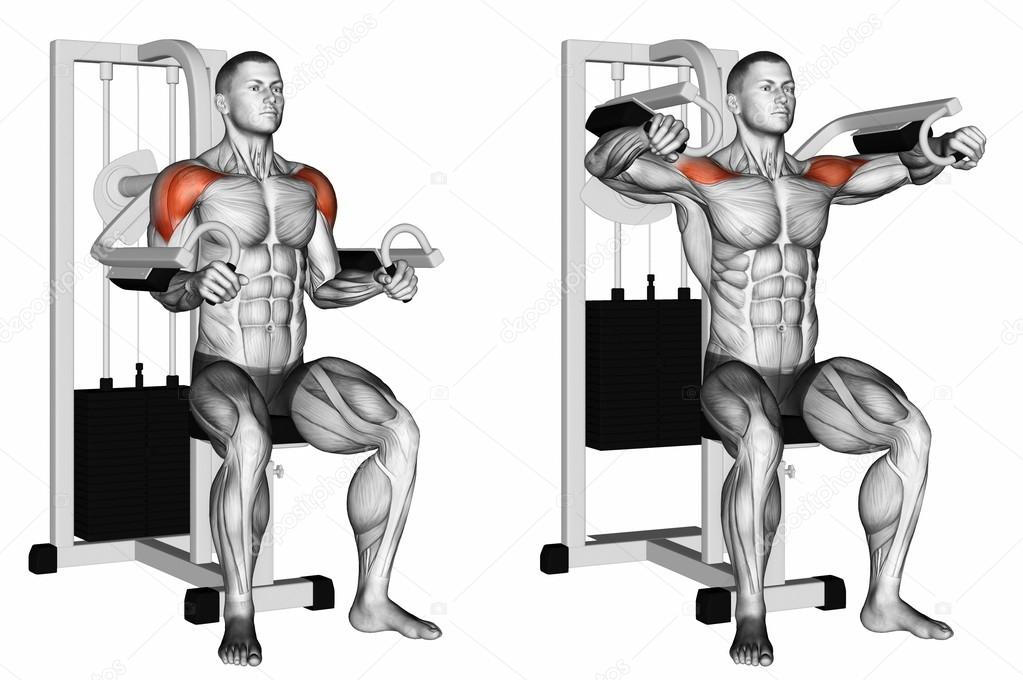
Разведение рук в тренажере (обратные разведения) – изолирующее упражнение для дельтовидных мышц, похожее по механике на махи гантелями в наклоне. Особенностью упражнения можно считать возможность упора туловища в скамью тренажера, за счет чего происходит качественная проработка мышц – корпус лишается возможности к раскачиванию.
Работающие мышцы и способы хвата
Обратные разведения напрямую воздействуют на дельтовидные мышцы (а именно – на задние пучки). Дополнительно включаются:
Дополнительно включаются:
- трапециевидная мышца;
- ромбовидная.
Обратные разведения в тренажере могут выполняться с использованием различных вариантов хвата:
- классический, наиболее распространенный вид хвата – когда ладони находятся на вертикальных ручках тренажера друг напротив друга, а большие пальцы направлены в потолок;
- другой вид хвата противоположен классическому – кисти рук направлены друг на друга тыльной стороной, большие пальцы обращены к полу, хват осуществляется за вертикальные ручки;
- последний вариант хвата является специфичным, так как на большей части тренажеров отсутствуют ручки для такого вида хватов – хват осуществляется за ручки, которые расположены горизонтально, большие пальцы направлены друг на друга, а ладони обращены вниз.
Исходное положение
Прежде чем приступать к выполнению упражнений на разведение рук, потребуется регулировка некоторых параметров тренажера. Настройте его так, чтобы, находясь в расслабленном состоянии, ваши руки на рукоятках располагались примерно на ширине плеч. При полном отведении рук они должны быть практически прямыми и максимально параллельными полу.
При полном отведении рук они должны быть практически прямыми и максимально параллельными полу.
Непосредственно в ходе выполнения упражнения следите за расположением собственного тела: грудная клетка должна плотно прижиматься к спинке тренажера, корпус расположен строго перпендикулярно полу, спина имеет небольшой прогиб в области поясницы, руки прямые, ладони располагаются друг напротив друга. До начала выполнения упражнения на разведение рук в тренажере немного отодвиньте друг от друга рукоятки, чтобы слегка приподнять с упоров вес.
Техника выполнения
Перед моментом подъема груза выполните глубокий вдох и на некоторое время задержите дыхание. Затем, ощущая напряжение задних дельт, разведите рукоятки на максимально возможное расстояние назад. Следите, чтобы локти отодвинулись за плоскость спины. Если вы хотите максимально нагрузить именно дельтовидные мышцы и выключить трапецию, старайтесь разворачивать плечи вперед.
В то время, когда руки достигнут максимально возможного отведения, задержите их ненадолго в этом положении, продолжая удерживать напряжение мышц, после этого можете выполнить выдох и вернуться в исходное положение. Затем на секунду задержитесь в начальном положении и продолжайте выполнять повторы упражнения.
Затем на секунду задержитесь в начальном положении и продолжайте выполнять повторы упражнения.
https://www.youtube.com/watch?v=02PapkNQQwU
Некоторые тренажеры сконструированы таким образом, что выполнять обратные разведения с полностью прямыми руками не представляется возможным, поэтому допускается выполнение со слегка согнутыми руками. Основным условием является неподвижность локтевого сустава – при осуществлении разведения он не должен двигаться.
Рекомендации
Для облегчения работы при выполнении упражнения на отведение рук нужно представить себе, что вы отводите назад не рукоятки тренажера, а собственные локти. Таким образом получится исключить из работы руки и больше задействовать именно целевые мышцы.
Корпус во время выполнения упражнения должен быть максимально неподвижен, старайтесь фиксировать его в одном положении. Это обеспечит большую эффективность выполнения и безопасность для вас. При выполнении разведения рук произвести более мощное усилие позволит правильное дыхание.

Для максимального включения в работу дельтовидных мышц старайтесь в ходе выполнения упражнения по максимуму отводить локти за спину. Если сделать этого вы не можете, это означает, что нужно немного уменьшить вес снаряда или же развивать большую гибкость плечевых суставов.
Была ли статья для вас полезна?
Пожалуйста, оцените!
Очень жаль, что статья не была для вас полезна.
Просим вашего совета!
Расскажите, как мы можем улучшить материал?
Спасибо за ваш отзыв!
FitNavigator.ru/ редакция
Материал подготовлен командой сайта при поддержке наших экспертов: спортсменов, тренеров и специалистов по питанию.
Поделиться:
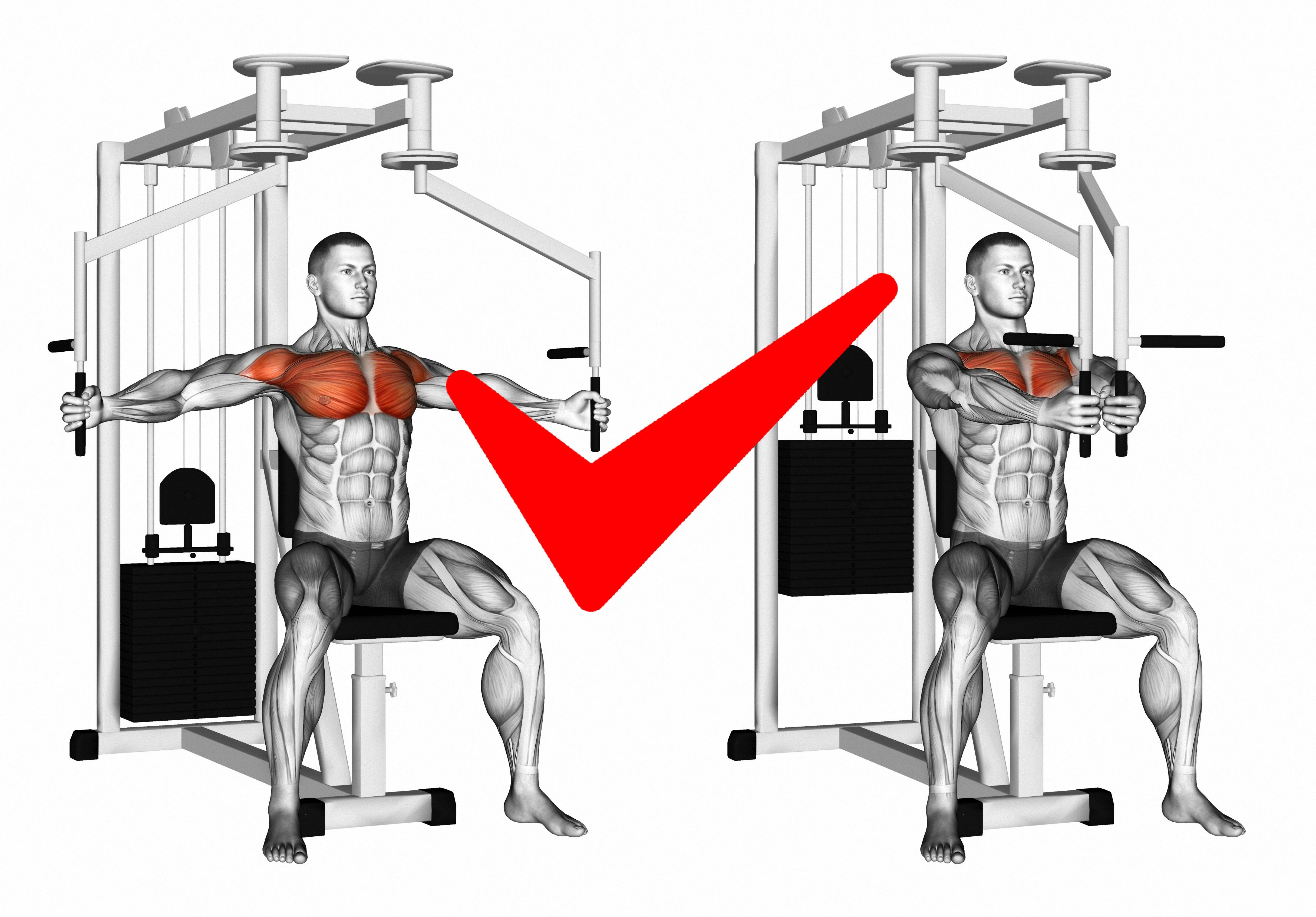
Разведение рук в тренажере (обратная бабочка) — Упражнения
DailyFitУпражненияПлечи
- Группа мышц:
Плечи - Тип упражнения:
Изолирующее - Вид упражнения:
Силовое - Оборудование:
Тренажер - Уровень сложности:
Начинающий
- Установите рукоятки тренажера в крайнее заднее положение.
 Выберите подходящий вес и отрегулируйте высоту сидения так, чтобы ручки тренажера были на уровне плеч.
Выберите подходящий вес и отрегулируйте высоту сидения так, чтобы ручки тренажера были на уровне плеч. - Возьмитесь за ручки пронированным хватом. Это будет вашим исходным положением.
- Отведите руки назад, сокращая задние дельты.
- Во время движения держите руки полностью распрямленными, все движение должно происходить только в плечевом суставе.
- Зафиксируйте конечное положение на несколько секунд и медленно вернитесь к исходной позиции.
упражнения на плечи
02.08.12
2
66 556
Анализ биомеханики реверсивного тотального эндопротезирования плечевого сустава с использованием динамического симулятора плеча
Рис. 9.1
Схема симулятора плеча. Лопатка была загерметизирована и жестко прикреплена к моделирующему устройству таким образом, чтобы плечелопаточное сочленение приблизительно соответствовало анатомической ориентации. Приводы применяли смещение к месту прикрепления дельтовидной мышцы, чтобы отвести руку в плоскости лопатки, в то время как датчики силы регистрировали силу. К местам прикрепления вращательной манжеты плеча прикладывались статические нагрузки, чтобы плечевая кость располагалась на гленоиде. Локоть фиксировали в прямом или согнутом положении с помощью индивидуальной внешней фиксации. Кинематика руки была количественно оценена с помощью массивов трехмерных оптических диодов слежения на фиксирующих штифтах [9].0007 32 ]
К местам прикрепления вращательной манжеты плеча прикладывались статические нагрузки, чтобы плечевая кость располагалась на гленоиде. Локоть фиксировали в прямом или согнутом положении с помощью индивидуальной внешней фиксации. Кинематика руки была количественно оценена с помощью массивов трехмерных оптических диодов слежения на фиксирующих штифтах [9].0007 32 ]
Три линии дельтовидных мышц проходят через изготовленные на заказ шкивы Delrin (DuPont, Уилмингтон, Делавэр, США), жестко подвешенные к раме тренажера. Делриновая направляющая с прорезями обеспечивает боковую степень свободы дельтовидных линий (<5 мм) вдоль несущей поверхности шкива, чтобы предотвратить заедание или смещение динамически меняющихся линий действия. Передний блок дельтовидной мышцы расположен на 5 мм латеральнее переднебокового угла клювовидного отростка. Средний блок дельтовидной мышцы расположен на 5 мм латеральнее акромиона, посередине между переднебоковым и заднелатеральным углами. Задний блок дельтовидной мышцы расположен на 5 мм выше ости лопатки посередине места прикрепления задней дельтовидной мышцы. Анатомические ориентиры определяются пальпаторно, чтобы сохранить охват мягких тканей. Линии действия ротаторной манжеты для статической нагрузки применяются к SSC, SS и IS/TM, где линии действия проходят через шкивы, прикрепленные к монтажному блоку. Статические веса применяются к линиям вращательной манжеты, чтобы уменьшить сустав, позволяя дельтовидной мышце действовать как первичный двигатель. Как отмечалось ранее, тренажер в настоящее время включает линии действия вращательной манжеты с электроприводом. Каждая линия действия дельтовидной мышцы включает в себя тензодатчик на 100 или 250 фунтов для контроля силы, прилагаемой для достижения движения руки. Код пользовательского управления написан с использованием программного обеспечения LabVIEW (National Instruments Corp, Остин, Техас, США).
Задний блок дельтовидной мышцы расположен на 5 мм выше ости лопатки посередине места прикрепления задней дельтовидной мышцы. Анатомические ориентиры определяются пальпаторно, чтобы сохранить охват мягких тканей. Линии действия ротаторной манжеты для статической нагрузки применяются к SSC, SS и IS/TM, где линии действия проходят через шкивы, прикрепленные к монтажному блоку. Статические веса применяются к линиям вращательной манжеты, чтобы уменьшить сустав, позволяя дельтовидной мышце действовать как первичный двигатель. Как отмечалось ранее, тренажер в настоящее время включает линии действия вращательной манжеты с электроприводом. Каждая линия действия дельтовидной мышцы включает в себя тензодатчик на 100 или 250 фунтов для контроля силы, прилагаемой для достижения движения руки. Код пользовательского управления написан с использованием программного обеспечения LabVIEW (National Instruments Corp, Остин, Техас, США).
В режиме обучения контроллер задает вклад каждого привода в процентах от общей требуемой силы, измеренной тензодатчиками. В режиме управления нагрузкой каждый исполнительный механизм втягивается и выдвигается, чтобы поддерживать свой относительный процент от общей нагрузки, реагируя на изменения хода линии, когда рука поднимается и вращается пользователем. Положения исполнительных механизмов постоянно записываются и записываются в файл траектории, определяющий желаемый путь движения. Для измерения приложенных сил в зависимости от пространственного положения система устанавливается в режим управления положением, при котором приводы воспроизводят отклонения, записанные в файле траектории, поднимая и поворачивая руку в зависимости от положения привода.
В режиме управления нагрузкой каждый исполнительный механизм втягивается и выдвигается, чтобы поддерживать свой относительный процент от общей нагрузки, реагируя на изменения хода линии, когда рука поднимается и вращается пользователем. Положения исполнительных механизмов постоянно записываются и записываются в файл траектории, определяющий желаемый путь движения. Для измерения приложенных сил в зависимости от пространственного положения система устанавливается в режим управления положением, при котором приводы воспроизводят отклонения, записанные в файле траектории, поднимая и поворачивая руку в зависимости от положения привода.
Матрицы оптических диодов слежения (Optotrak 3020, Northern Digital Inc., Ватерлоо, Онтарио, Канада), закрепленные на дистальном отделе плечевой и локтевой костей, отслеживают пространственное положение руки в зависимости от смещения привода. Пространственные массивы соответствуют сфере для расчета центра вращения плечевой кости с использованием минимизации по методу наименьших квадратов. Дополнительные массивы Optotrak крепятся к раме симулятора и монтажному блоку, чтобы убедиться, что структурные компоненты симулятора являются жесткими. С каждой поверхности блока для заливки собираются три оцифрованные точки, чтобы данные с образцов можно было преобразовать обратно в соответствующие системы координат КТ. Это позволяет центру вращения как нативной, так и имплантированной руки ориентироваться на плоскость гленоида и лопатки, не обнажая плечевой сустав.
Дополнительные массивы Optotrak крепятся к раме симулятора и монтажному блоку, чтобы убедиться, что структурные компоненты симулятора являются жесткими. С каждой поверхности блока для заливки собираются три оцифрованные точки, чтобы данные с образцов можно было преобразовать обратно в соответствующие системы координат КТ. Это позволяет центру вращения как нативной, так и имплантированной руки ориентироваться на плоскость гленоида и лопатки, не обнажая плечевой сустав.
Вопрос № 1 — Какие комбинации натяжения сустава и плечевой версии в rTSA оптимизируют кинематические и кинетические результаты? [
31 ]
Успешные результаты после rTSA в идеале максимально увеличивают диапазон движений при минимальной нестабильности и нагрузке на дельтовидную мышцу. Несмотря на растущую распространенность rTSA за последние 10 лет, все еще ведутся споры об оптимальной конфигурации и размещении оборудования для достижения этих целей. Оптимальный вариант плечевой кости обсуждается, авторы рекомендуют от 0° до 30° ретроверсии [9]. 0007 33 – 35 ]. Буало и др. [ 6 ] сообщили, что интраоперационное определение напряжения дельтовидной мышцы в основном зависит от опыта хирурга. Что касается натяжения сустава, максимально плотное размещение имплантата может свести к минимуму вероятность вывиха, но это может быть источником остаточной дельтовидной и клювовидно-плечевой/бицепсной короткой боли, связанной с головкой, и, возможно, риском акромиальных стрессовых переломов.
0007 33 – 35 ]. Буало и др. [ 6 ] сообщили, что интраоперационное определение напряжения дельтовидной мышцы в основном зависит от опыта хирурга. Что касается натяжения сустава, максимально плотное размещение имплантата может свести к минимуму вероятность вывиха, но это может быть источником остаточной дельтовидной и клювовидно-плечевой/бицепсной короткой боли, связанной с головкой, и, возможно, риском акромиальных стрессовых переломов.
В нескольких биомеханических исследованиях оценивалось влияние плечевой версии на исходы после rTSA [ 8 , 29 , 36 , 37 ]. Стефенсон и др. [ 37 ] оценили, как изменения в плечевой версии влияют на диапазон движений IR и ER, и определили, что 20°–40° ретроверсии плечевой кости наиболее точно восстанавливает функциональную дугу движения без импинджмента. Беруэ и др. [ 36 ] определили, что размещение плечевого компонента в положении 10–20° ретроверсии (повторяя нормальный вариант) наиболее эффективно ограничивает импинджмент нижней лопатки. Фавр и др. [ 8 ] оценили влияние плечевой версии на стабильность и определили, что в условиях нейтральной гленосферной версии стабильность увеличивается с плечевой версией от 0° до антеверсии. Наконец, Гулотта и соавт. [ 29 ] определили, что изменения в плечевой версии не влияли на дельтовидную силу, необходимую для скапирования, а увеличение ретроверсии улучшало ER, но ограничивало IR. Сообщений о растяжении суставов при rTSA крайне мало, отчасти из-за экспериментального удаления или опущения структур мягких тканей в плечевом суставе.
Фавр и др. [ 8 ] оценили влияние плечевой версии на стабильность и определили, что в условиях нейтральной гленосферной версии стабильность увеличивается с плечевой версией от 0° до антеверсии. Наконец, Гулотта и соавт. [ 29 ] определили, что изменения в плечевой версии не влияли на дельтовидную силу, необходимую для скапирования, а увеличение ретроверсии улучшало ER, но ограничивало IR. Сообщений о растяжении суставов при rTSA крайне мало, отчасти из-за экспериментального удаления или опущения структур мягких тканей в плечевом суставе.
Наша группа оценила комбинированный эффект изменения напряжения сустава и плечевого сустава с помощью тренажера. Мы проверили трупы, сначала оценив их базовый естественный диапазон движений и профили движения/силы для отведения и вращения. Затем мы имплантировали протез Tornier Aequalis Reversed Shoulder в каждую руку. Исходная конфигурация состояла из 10° ретроверсии плечевой кости с полимерной вставкой диаметром 9 мм. Затем версию и натяжение увеличили, чтобы проверить все 9 комбинаций ретроверсии 0°, 10° и 20° с 6 мм, 9мм и полимерные вставки 12 мм.
Затем версию и натяжение увеличили, чтобы проверить все 9 комбинаций ретроверсии 0°, 10° и 20° с 6 мм, 9мм и полимерные вставки 12 мм.
Результаты показали, что центр вращения плечевой кости сместился медиально на 17 мм и вниз на 12 мм после имплантации rTSA, что согласуется с предыдущими исследованиями rTSA по методу Граммонта [ 27 , 38 , 39 ]. Изменения ретроверсии не влияли на диапазон движений или стабильность ЭПР, но 10° ретроверсии приводили к наибольшему дефициту аддукции. Увеличение толщины полимерной вставки уменьшило диапазон движений как в отведении, так и в приведении (рис. 9)..2) [ 31 ]. Несмотря на потерю движения, увеличенная толщина имплантата и возникающее в результате напряжение в суставе улучшили стабильность имплантата без общего увеличения дельтовидной силы, необходимой для отведения (рис. 9.3). Все конфигурации имплантатов приводили к чистому механическому преимуществу, уменьшая силы, необходимые для подъема по сравнению с родным плечом. ). Отведение в покое увеличилось как минимум на 10° по сравнению с исходным. а В зависимости от толщины вставки, ретроверсия на 10° приводила к наибольшему отведению в покое. b В зависимости от варианта постепенное увеличение толщины вставки приводило к постепенному увеличению отведения в покое. Среднее ± SEM [ 31 ]
). Отведение в покое увеличилось как минимум на 10° по сравнению с исходным. а В зависимости от толщины вставки, ретроверсия на 10° приводила к наибольшему отведению в покое. b В зависимости от варианта постепенное увеличение толщины вставки приводило к постепенному увеличению отведения в покое. Среднее ± SEM [ 31 ]
Рис. 9.3
Увеличение толщины полипропилена в протезе Tornier Aequalis Reversed Shoulder значительно увеличило силу вывиха с увеличением толщины имплантата. Боковая дислокационная сила демонстрировала ступенчатое увеличение с увеличением толщины полипропилена и была значимой для всех протестированных комбинаций (*) [ 31 ]
Размещение rTSA между 0° и 20° ретроверсии не влияло на ротационный диапазон движения. Эти результаты отличаются от результатов Стефенсона и Гулотты, которые сообщили об изменениях в ретроверсии, влияющих на диапазон движений без импинджмента [9].0007 17 , 40 ]. Результаты предыдущих исследований и текущие данные могут отличаться из-за натяжения мягких тканей, ограничивающего общую ротацию до того, как возникнет прямой импинджмент. Ни Стефенсон (трупы без мягких тканей), ни Гулотта (расчетная модель) не использовали полные трупные плечи со всеми неповрежденными мягкими тканями [ 17 , 40 ]. В нашем исследовании увеличение толщины полипропилена имплантата или натяжения сустава улучшало стабильность имплантата за счет уменьшения общего диапазона движений в отведении/приведении. В то время как увеличение толщины полиамида ограничивает нестабильность, следует проявлять осторожность, поскольку чрезмерное натяжение связано с потерей диапазона движения по высоте. Кроме того, чрезмерное напряжение в суставах может усугубить остаточную дельтовидную боль или увеличить риск перелома акромиального отростка в клинической популяции.
Ни Стефенсон (трупы без мягких тканей), ни Гулотта (расчетная модель) не использовали полные трупные плечи со всеми неповрежденными мягкими тканями [ 17 , 40 ]. В нашем исследовании увеличение толщины полипропилена имплантата или натяжения сустава улучшало стабильность имплантата за счет уменьшения общего диапазона движений в отведении/приведении. В то время как увеличение толщины полиамида ограничивает нестабильность, следует проявлять осторожность, поскольку чрезмерное натяжение связано с потерей диапазона движения по высоте. Кроме того, чрезмерное напряжение в суставах может усугубить остаточную дельтовидную боль или увеличить риск перелома акромиального отростка в клинической популяции.
Вопрос № 2. Каков эффект изолированной латерализации гленосферы в rTSA по методу Граммонта? [
30 ]
Двумя основными ограничениями rTSA по методу Граммонта являются выемка лопатки и неспособность восстановить ER, несмотря на значительные улучшения в подъеме вперед и отведении. Буало и др. [ 6 ] определили, что ER улучшилась только примерно на 5° с протезом Tornier Aequalis Reversed Shoulder, где гленосфера медиализовала центр вращения к поверхности гленоида. В том же исследовании авторы сообщили о частоте выемки лопатки в 68 % с вывихом в 7 %. В 2011 г. Буало и соавт. [ 5 ] сообщается о 42 плечевых суставах, которым была проведена такая же rTSA с добавлением 10-мм костного трансплантата под опорную пластину, что эффективно латерализирует центр вращения гленосферы. В этом последующем наблюдении они сообщили об улучшении ER на 10 °, частоте насечек лопатки на 19 % и отсутствии вывихов. Эти исследования показывают, что латерализация гленосферы с помощью костной прокладки может улучшить стабильность сустава и уменьшить зазубрины, аналогичные латерализации центра вращения с латеральным смещением гленосферы, доступной в системе Reverse Shoulder Prothesis (DJO, Austin, TX) [9].0007 7 , 33 ]. Подчеркивая эти клинические преимущества, ни одно лабораторное исследование ранее не изучало биомеханические эффекты изолированной латерализации гленосферы в имплантате типа Grammont с плечевыми суставами, ограниченными мягкими тканями.
Буало и др. [ 6 ] определили, что ER улучшилась только примерно на 5° с протезом Tornier Aequalis Reversed Shoulder, где гленосфера медиализовала центр вращения к поверхности гленоида. В том же исследовании авторы сообщили о частоте выемки лопатки в 68 % с вывихом в 7 %. В 2011 г. Буало и соавт. [ 5 ] сообщается о 42 плечевых суставах, которым была проведена такая же rTSA с добавлением 10-мм костного трансплантата под опорную пластину, что эффективно латерализирует центр вращения гленосферы. В этом последующем наблюдении они сообщили об улучшении ER на 10 °, частоте насечек лопатки на 19 % и отсутствии вывихов. Эти исследования показывают, что латерализация гленосферы с помощью костной прокладки может улучшить стабильность сустава и уменьшить зазубрины, аналогичные латерализации центра вращения с латеральным смещением гленосферы, доступной в системе Reverse Shoulder Prothesis (DJO, Austin, TX) [9].0007 7 , 33 ]. Подчеркивая эти клинические преимущества, ни одно лабораторное исследование ранее не изучало биомеханические эффекты изолированной латерализации гленосферы в имплантате типа Grammont с плечевыми суставами, ограниченными мягкими тканями.
Мы исследовали влияние латерализации гленосферы с помощью симулятора плеча. В частности, были созданы добавочные металлические прокладки для имитации костного трансплантата, помещенного под гленоидную опорную пластину rTSA. Мы проверили трупы, сначала оценив их базовый естественный диапазон движений и профили движения/силы для похищения. Затем мы имплантировали реверсивный плечевой протез Tornier Aequalis в каждую руку. Исходная конфигурация состояла из 10° ретроверсии плечевой кости с 9°.полимерная вставка мм, с гленосферой заподлицо с опорной плитой гленоида. Затем мы постепенно латерализовали гленосферу, используя прокладки 5, 10 и 15 мм (рис. 9.4). Наши результаты показали, что латерализация не влияла на пассивное отведение/приведение или IR/ER. Латерализация значительно увеличивала дельтовидную силу, необходимую для отведения линейным образом с каждым смещением на 5 мм (рис. 9.5). Латерализация также увеличивала силу вывиха плеча после достижения 10 мм латерализации (рис. ). Латеральное смещение приводило к ступенчатому увеличению силы отведения, которое было достоверным во всех случаях (*). Среднее ± SEM [ 9). Боковая дислокационная сила демонстрировала ступенчатое увеличение COR с латеральным смещением, что было значительным для большинства протестированных комбинаций (*). Передний вывих показал аналогичную тенденцию, но показал ограниченную статистическую значимость (*). Среднее ± SD [ 30 ]
). Латеральное смещение приводило к ступенчатому увеличению силы отведения, которое было достоверным во всех случаях (*). Среднее ± SEM [ 9). Боковая дислокационная сила демонстрировала ступенчатое увеличение COR с латеральным смещением, что было значительным для большинства протестированных комбинаций (*). Передний вывих показал аналогичную тенденцию, но показал ограниченную статистическую значимость (*). Среднее ± SD [ 30 ]
Эти данные подтверждают, что латерализация гленосферы является разумным методом улучшения стабильности, но за счет увеличения дельтовидной силы для подъема руки. Латерализация оказала минимальное влияние на ротационное движение, что опять-таки может быть связано с натяжением мягких тканей, ограничивающим диапазон движения без импинджмента, наблюдаемый в компьютерных или костных моделях. Эти данные хорошо согласуются с клиническими данными, свидетельствующими об улучшении стабильности с минимальным влиянием на диапазон ротационных движений [9]. 0007 5 ]. Что не было изучено, так это потенциальная стоимость повышенных требований к дельтовидной силе для долговечности имплантата. Увеличение силы дельтовидной мышцы может привести к боли, связанной с дельтовидной мышцей, и/или ускорить ухудшение функции имплантата, которое, как сообщается, происходит примерно через 6 лет после операции [ 41 ].
0007 5 ]. Что не было изучено, так это потенциальная стоимость повышенных требований к дельтовидной силе для долговечности имплантата. Увеличение силы дельтовидной мышцы может привести к боли, связанной с дельтовидной мышцей, и/или ускорить ухудшение функции имплантата, которое, как сообщается, происходит примерно через 6 лет после операции [ 41 ].
Вопрос № 3. Существуют ли значительные кинематические и кинетические различия между базовыми системами rTSA, разработанными вокруг медиального или латерального центра вращения? [
32 ]
Для использования хирургами доступны многочисленные системы rTSA. Ранние системы rTSA включали гленосферу с латеральным смещением для сохранения анатомического центра вращения сустава, но эти конструкции страдали ранним расшатыванием имплантата и от них отказались [ 42 , 43 ]. Имплантат типа Граммонта размещает гленосферу на поверхности гленоида, чтобы уменьшить вращательные изгибающие моменты и напряжение сдвига на гленоиде, решая проблему расшатывания, но приводя к зазубринам лопатки [9]. 0007 40 , 44 ]. В недавних конструкциях rTSA повторно введено латерализованное смещение центра вращения наряду с улучшенной фиксацией гленоида, чтобы ограничить нижний импинджмент и зазубрины, а также ослабление гленосферы, наблюдаемое в более ранних латеральных конструкциях [ 7 ]. В настоящее время все системы rTSA, доступные для хирургов-ортопедов, построены вокруг этих двух основных конструкций систем — латерального и медиального центра вращения гленосферы.
0007 40 , 44 ]. В недавних конструкциях rTSA повторно введено латерализованное смещение центра вращения наряду с улучшенной фиксацией гленоида, чтобы ограничить нижний импинджмент и зазубрины, а также ослабление гленосферы, наблюдаемое в более ранних латеральных конструкциях [ 7 ]. В настоящее время все системы rTSA, доступные для хирургов-ортопедов, построены вокруг этих двух основных конструкций систем — латерального и медиального центра вращения гленосферы.
Было проведено множество исследований суррогатных костей, расчетов и моделирования, чтобы определить влияние индивидуальных конструктивных характеристик rTSA. Несмотря на обширную литературу, показывающую, что конфигурации rTSA могут индивидуально влиять на результаты, ни в одном исследовании не проводилось прямого сравнения комбинированных характеристик систем rTSA, включая все конструктивные различия, уникальные для каждой системы, в модели трупа с ограничением мягких тканей.
Наша группа оценила эффективность двух часто используемых систем rTSA: реверсивного плечевого протеза Aequalis (Tornier, Edina, Миннесота, США) и реверсивного плечевого протеза (DJO Surgical, Остин, Техас, США). Aequalis представляет собой медиализованную гленосферную систему в стиле Граммонта, тогда как RSP представляет собой латерализованную гленосферную систему. Мы исследовали эти системы с помощью тренажера плеча на 14 свежезамороженных парных верхних конечностях. Трупы были протестированы, сначала оценив их базовый естественный диапазон движения и профили движения/силы для диапазонов отведения и пассивного вращения. Случайным образом одно плечо пары получило Aequalis, а противоположное плечо получило RSP. Для каждой системы использовалась наиболее часто используемая конфигурация каждого имплантата. Aequalis Reversed Shoulder был помещен в 10° ретроверсии плечевой кости с шагом 9.полимерная вставка мм с 36-мм гленосферой в конфигурации наклона 10 градусов, имитирующей латеральное смещение COR на 4 мм. Основание гленоида было выровнено по нижней части гленоида и размещено заподлицо с поверхностью гленоида. RSP был помещен в 30° ретроверсии плечевой кости с гленосферой 32-4 в наклоне 10° книзу.
Aequalis представляет собой медиализованную гленосферную систему в стиле Граммонта, тогда как RSP представляет собой латерализованную гленосферную систему. Мы исследовали эти системы с помощью тренажера плеча на 14 свежезамороженных парных верхних конечностях. Трупы были протестированы, сначала оценив их базовый естественный диапазон движения и профили движения/силы для диапазонов отведения и пассивного вращения. Случайным образом одно плечо пары получило Aequalis, а противоположное плечо получило RSP. Для каждой системы использовалась наиболее часто используемая конфигурация каждого имплантата. Aequalis Reversed Shoulder был помещен в 10° ретроверсии плечевой кости с шагом 9.полимерная вставка мм с 36-мм гленосферой в конфигурации наклона 10 градусов, имитирующей латеральное смещение COR на 4 мм. Основание гленоида было выровнено по нижней части гленоида и размещено заподлицо с поверхностью гленоида. RSP был помещен в 30° ретроверсии плечевой кости с гленосферой 32-4 в наклоне 10° книзу. Использовалась нейтральная оболочка плечевой кости со стандартной полимерной вставкой, а базовая пластина гленоида располагалась по центру поверхности гленоида. Производитель каждого имплантата предоставил данные, подтверждающие, что на эти конфигурации приходится почти 70 % всех случаев имплантации в США, и поэтому они считаются «наиболее распространенными».
Использовалась нейтральная оболочка плечевой кости со стандартной полимерной вставкой, а базовая пластина гленоида располагалась по центру поверхности гленоида. Производитель каждого имплантата предоставил данные, подтверждающие, что на эти конфигурации приходится почти 70 % всех случаев имплантации в США, и поэтому они считаются «наиболее распространенными».
Обе системы сместили центр вращения сустава медиально и вниз по сравнению с нативным плечом, где у Aequalis было большее смещение, чем у RSP в обоих направлениях. Обе системы rTSA удлинили плечевую кость по сравнению с нативной приблизительно на 23 мм [ 17 ]. Медиальный центр вращения Aequalis приводил к медиальному смещению плечевой кости, тогда как RSP смещал плечевую кость только книзу (рис. 9.7). Что касается пассивного ROM (ab/adduction и IR/ER), RSP приводил к меньшему дефициту приведения, чем Aequalis (рис. 9)..8), но в остальном различий между системами не было. Наконец, не было различий в дельтовидной силе, необходимой для отведения между системами, хотя градиент силы, необходимый для начала отведения, был больше для Aequalis, чем для RSP (рис. 9.9). Это говорит о том, что инициировать отведение с помощью Aequalis сложнее, чем с RSP, но обе системы обеспечивают механическое преимущество по сравнению с нативным плечом.
9.9). Это говорит о том, что инициировать отведение с помощью Aequalis сложнее, чем с RSP, но обе системы обеспечивают механическое преимущество по сравнению с нативным плечом.
Только обладатели статуса Gold могут продолжить чтение. Войдите или зарегистрируйтесь, чтобы продолжить
Теги: Обратная артропластика плеча
22 октября 2016 г. | Опубликовано администратором в ОРТОПЕДИЧЕСКАЯ | Комментарии к записи «Анализ биомеханики обратного тотального эндопротезирования плечевого сустава с использованием динамического симулятора плечевого сустава
» отключены
Руки с моментом отведения плеча в трех клинически важных положениях
Сравнительное исследование
. 2009 г., июль-август; 18 (4): 632-8.
doi: 10.1016/j.jse.2008.10.021.
Хайди Ракштуль
1
, Яцек Кржицкий, Нассос Петру, Филипп Фавр, Тамара Хорн, Стефан Шмид, Эдгар Стусси
Принадлежности
принадлежность
- 1 Отдел машиностроения и технологии, Институт биомеханики, Цюрих, Швейцария.
 [email protected]
[email protected]
PMID:
19655429
DOI:
10.1016/j.jse.2008.10.021
Сравнительное исследование
Heidi Ruckstuhl et al.
J плечо локоть Surg.
2009 июль-август.
. 2009 г., июль-август; 18 (4): 632-8.
doi: 10.1016/j.jse.2008.10.021.
Авторы
Хайди Ракштуль
1
, Яцек Кржицкий, Нассос Петру, Филипп Фавр, Тамара Хорн, Стефан Шмид, Эдгар Стусси
принадлежность
- 1 Отдел машиностроения и технологии, Институт биомеханики, Цюрих, Швейцария.
 [email protected]
[email protected]
PMID:
19655429
DOI:
10.1016/j.jse.2008.10.021
Абстрактный
Плечи момента отведения 4 плечевых мышц были рассчитаны в клинически важных положениях, чтобы оценить наилучшую тестовую ситуацию для надостной мышцы на основе ее механического преимущества. Плечи момента надостной, подостной, средней и передней дельтовидной мышцы у 18 человек были рассчитаны с использованием индивидуальных данные резонансной томографии и инструмент компьютерного проектирования для моделирования. Три теста с рукой в нейтральном положении (рука висит на боку), в 90°, а также при 90° скапирования и полной внутренней ротации плечевой кости (проба Джобе). Надостная мышца имеет большее механическое преимущество по сравнению с другими испытуемыми мышцами в нейтральном положении руки. В положении Jobe плечо момента отведения надостной мышцы уменьшается при увеличении внутренней ротации плечевой кости. Сравнение этих результатов с литературными данными показывает, что этот новый метод подходит для расчета плеч момента и может использоваться в любой желаемой конфигурации сустава.
В положении Jobe плечо момента отведения надостной мышцы уменьшается при увеличении внутренней ротации плечевой кости. Сравнение этих результатов с литературными данными показывает, что этот новый метод подходит для расчета плеч момента и может использоваться в любой желаемой конфигурации сустава.
Похожие статьи
Моментные плечи мышц, охватывающих плечевой сустав: систематический обзор.
Хик Ф., Экленд, округ Колумбия.
Хик Ф. и др.
Дж Анат. 2019 янв; 234(1):1-15. doi: 10.1111/joa.12903. Epub 2018 8 ноября.
Дж Анат. 2019.PMID: 30411350
Бесплатная статья ЧВК.Влияние конструкции протеза на длину мышц и плечо момента при реверсивном тотальном эндопротезировании плечевого сустава.
Hamilton MA, Roche CP, Diep P, Flurin PH, Routman HD.
Гамильтон М.
 А. и соавт.
А. и соавт.
Булл Хосп Дж. Дис (2013). 2013; 71 Приложение 2:S31-5.
Булл Хосп Дж. Дис (2013). 2013.PMID: 24328577
Актуальность плеча момента мышц плеча по отношению к осевой ротации плечелопаточного сустава в четырех положениях.
Кючле Д.К., Ньюман С.Р., Итои Э., Нибур Г.Л., Морри Б.Ф., Ан К.Н.
Кючле Д.К. и соавт.
Clin Biomech (Бристоль, Эйвон). 2000 июнь; 15 (5): 322-9. doi: 10.1016/s0268-0033(99)00081-9.
Clin Biomech (Бристоль, Эйвон). 2000.PMID: 10758292
Момент рук плечевых мышц при осевом вращении.
Экленд, округ Колумбия, Панди М.Г.
Экленд, округ Колумбия, и др.
J Ортоп Res. 2011 май; 29(5):658-67. doi: 10.1002/jor.21269. Epub 2010 9 ноября.
J Ортоп Res. 2011.PMID: 21064160
Момент осевого вращения плеча мускулатуры плеча после реверсивного тотального эндопротезирования плечевого сустава.

Экленд, округ Колумбия, Ричардсон М., Панди М.Г.
Экленд, округ Колумбия, и др.
J Bone Joint Surg Am. 2012 17 октября; 94 (20): 1886-95. дои: 10.2106/JBJS.J.01861.
J Bone Joint Surg Am. 2012.PMID: 23079881
Посмотреть все похожие статьи
Цитируется
Предпочтительное положение плеча может изолировать активность надостной мышцы лучше, чем классический тест с пустой банкой: электромиографическое исследование.
Кийкунасатиан К., Ниёмха С., Воратанарат П., Виджиттракарнрунг К.
Кийкунасатиан С. и др.
BMC Расстройство опорно-двигательного аппарата. 2023 3 апреля; 24 (1): 255. doi: 10.1186/s12891-023-06372-3.
BMC Расстройство опорно-двигательного аппарата. 2023.PMID: 37013546
Бесплатная статья ЧВК.Значение начального пикового крутящего момента надостной мышцы во время сгибания плеча.

Lee JH, Park JS, Jeong WK.
Ли Дж. Х. и др.
Клин Ортоп Хирург. 2022 июнь; 14 (2): 272-280. дои: 10.4055/cios21133. Epub 2022 12 апр.
Клин Ортоп Хирург. 2022.PMID: 35685974
Бесплатная статья ЧВК.Трехмерная морфология лопатки связана с разрывами ротаторной манжеты и изменяет плечо момента отведения надостной мышцы.
Lee ECS, Roach NT, Clouthier AL, Bicknell RT, Bey MJ, Young NM, Rainbow MJ.
Ли ЭКС и др.
Clin Biomech (Бристоль, Эйвон). 2020 авг;78:105091. doi: 10.1016/j.clinbiomech.2020.105091. Epub 2020 11 июня.
Clin Biomech (Бристоль, Эйвон). 2020.PMID: 32580097
Бесплатная статья ЧВК.Экспериментальная количественная оценка допустимого пространства крутящего момента человеческого плеча.
Байяржон Э.
